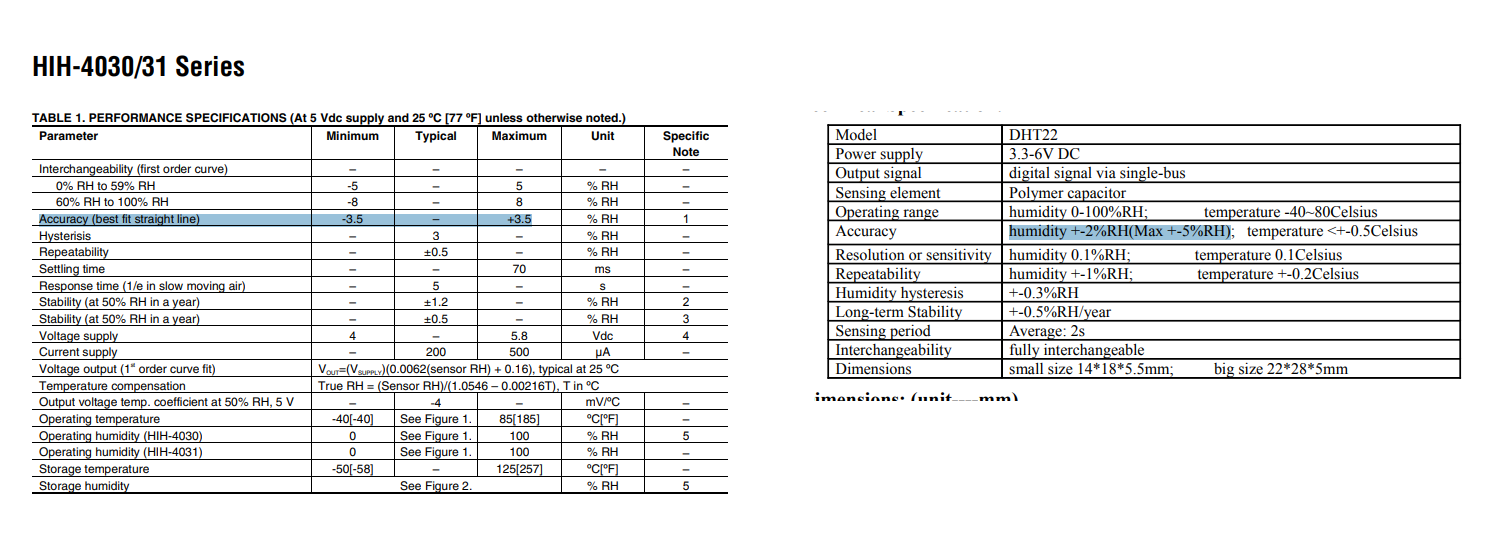
sensor 2 ตัวนี้ถ้าไม่เกี่ยงเรื่อง accuracy เท่าไหร่(รับได้ที่ไม่เกิน ±5% ซึ่งทั้งคู่ไม่เกิน) จะเน้นไปที่วัดความชื้นสัมพัทธ์ เลือกตัวไหนดีครับ
HIH-4030 ครับ DHT22 จากที่เคยใช้มันชอบค้าง