ช่วยแนะนำการต่อวงจรแขนกลหน่อยครับ:+1:

2 Likes
เรียนสาขาอะไรครับ แล้วมีความรู้เรื่องอะไรบ้าง
1 Likes
เรียนอิเล็กทรอนิกส์ครับ ผวา ตอนนี้กำลังศึกษาเรื่องArduinoครับ
2 Likes
โดยเบื่้องต้นลองศึกษาข้อมูลเพิ่มเติ่มก่อนก็ได้ครับ ผมมีโครงการจะทำแขนกลอยู่เหมือนกันรอติดตามละกันนะครับ
หรือถ้ายังไงลองซื้อโมดูลราคาไม่แพงมาทดสอบดูก่อน แล้วถ้าติดปัญหาอะไรในส่วนไหนเอามาคุยกันในนี้ได้เลยครับ 
1 Likes
พี่ครับ ผมอยาก รู้เกี่ยวกับวิธีการทำด้วยครับ อยากพี่ทำเป็นคลิปโชว์เลยได้ไหม55
2 Likes
ถ้าจะเริ่มแบบง่ายๆ เลยแบบคลิปช่วงแรกก็มีขั้นตอนอยู่นะครับ มีวงจรต่อให้ดูด้วย แต่อาจต้องใช้ สามดีปริ้นเตอร์ ปริ้นชิ้นส่วนที่เขามีให้ออกมา
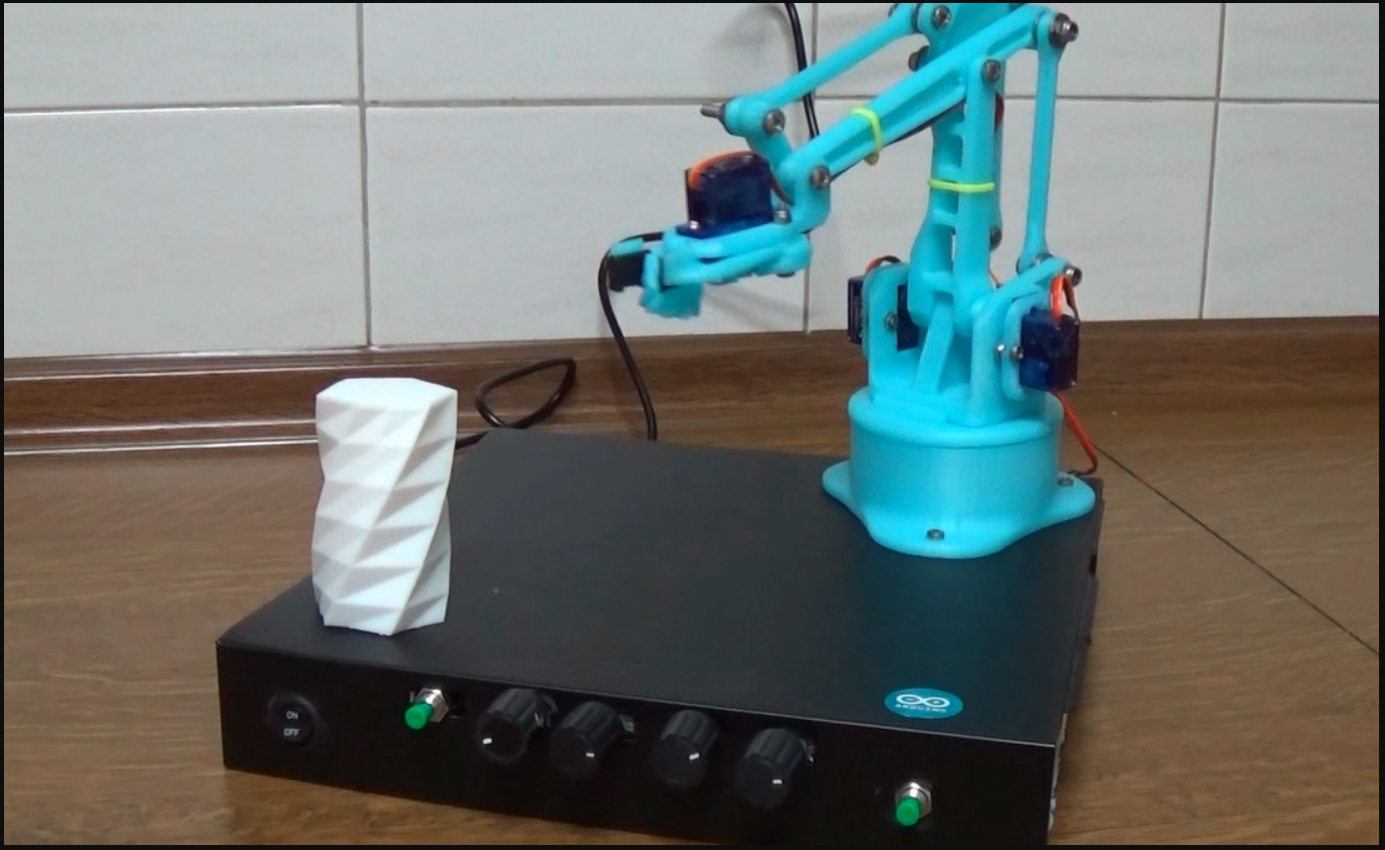
ส่วนของกล่องควบคุมการทำงาน
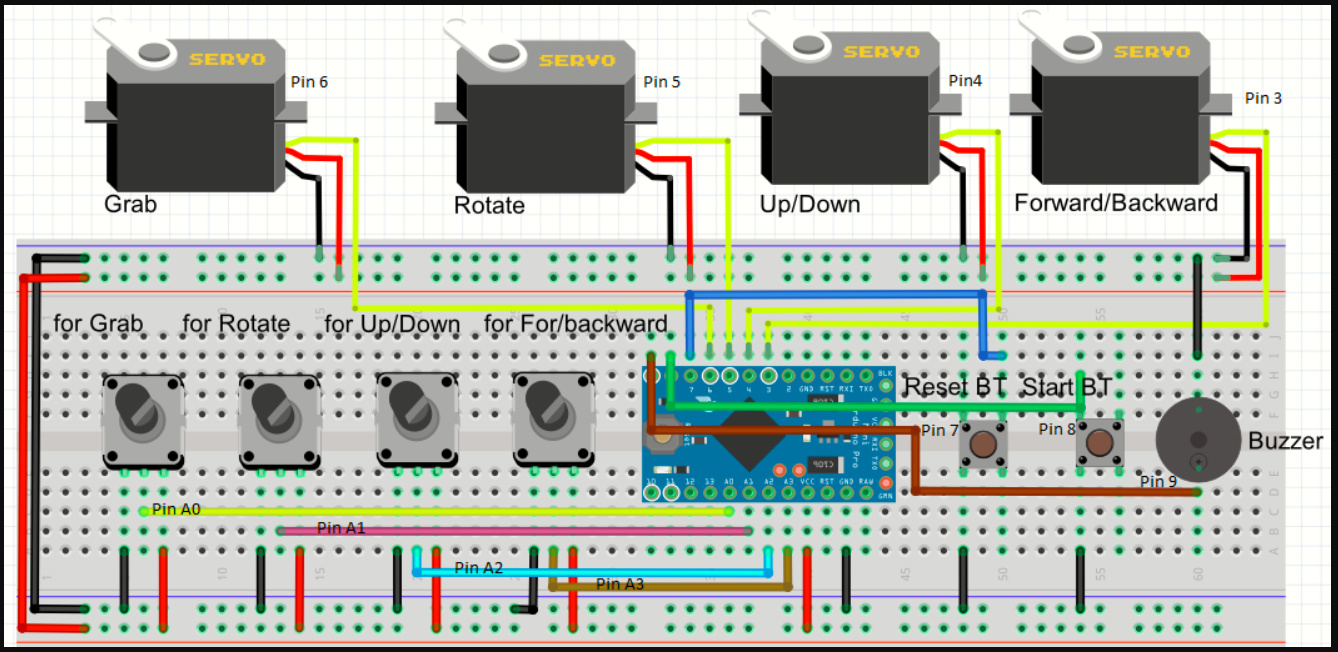
ส่วนของโค้ด
/* Arduino Robotic Arm with Grab
* More info: http://www.ardumotive.com/
* Dev: Michalis Vasilakis Data: 12/12/2016 Ver: 1.1 */
#include <Servo.h>
//Create servo objects to control servo motors
Servo up_down;
Servo forward_backward;
Servo rotate;
Servo grab;
//Constants
const int startBT = 7;
const int teachBT = 8;
const int buzzer = 9;
const int potForwardBackward = A3;
const int potUpDown = A2;
const int potRotate = A1;
const int potGrab = A0;
//Max and Min values for servos ! Change them to meet your setup !
const int minGrab=180;
const int maxGrab=126;
const int minRotate=0;
const int maxRotate=100;
const int minUpDown=5;
const int maxUpDown=100;
const int minForwardBackward=160;
const int maxForwardBackward=80;
//-------------------------------------//
//Variables
int readUpDown,readForwardBackward,readRotate,readGrab,readTeach,readStart;
int teachUpDown[100],teachForwardBackward[100],teachRotate[100],teachGrab[100];
boolean started =false;
int index = 1;
int stepSpeed = 20; //Change this to fo faster!
void setup() {
//Attach Servo motors
forward_backward.attach(3);
up_down.attach(4);
rotate.attach(5); //portokali xontro
grab.attach(6);
//Inputs-Outputs
pinMode(teachBT, INPUT_PULLUP);
pinMode(startBT, INPUT_PULLUP);
pinMode(buzzer, OUTPUT);
//Do a smooth movement on startup, from home potion to pot position:
readInputs();
goHome();
goPot();
}
void loop() {
if (!started){
readInputs();
moveServos();
if (readTeach==LOW){
savePosition();
tone(buzzer,500);
delay(500);
noTone(buzzer);
}
if (readStart==LOW){
tone(buzzer,700);
started=true;
delay(1000);
noTone(buzzer);
}
}
else{
goHome();
runTeach();
}
}
void readInputs(){
//Read potentiometers
readUpDown = analogRead(potUpDown);
readUpDown = map(readUpDown,0,1023,minUpDown,maxUpDown);
readForwardBackward = analogRead(potForwardBackward);
readForwardBackward = map(readForwardBackward,0,1023,minForwardBackward,maxForwardBackward);
readRotate = analogRead(potRotate);
readRotate = map(readRotate,0,1023,minRotate,maxRotate);
readGrab = analogRead(potGrab);
readGrab = map(readGrab,0,1023,minGrab,maxGrab);
//Read buttons
readTeach = digitalRead(teachBT);
readStart = digitalRead(startBT);
delay(50);
}
void moveServos(){
up_down.write(readUpDown);
forward_backward.write(readForwardBackward);
rotate.write(readRotate);
grab.write(readGrab);
}
void savePosition(){
teachUpDown[index] = readUpDown;
teachForwardBackward[index] = readForwardBackward;
teachRotate[index] = readRotate;
teachGrab[index] = readGrab;
index++;
}
void runTeach(){
for (int i=0; i<index-1; i++){
if (teachRotate[i] < teachRotate[i+1]){
for (int j = teachRotate[i]; j<= teachRotate[i+1]; j++){
rotate.write(j);
delay(stepSpeed);
}
}
else if (teachRotate[i] > teachRotate[i+1]){
for (int j = teachRotate[i]; j>= teachRotate[i+1]; j--){
rotate.write(j);
delay(stepSpeed);
}
}
else{
rotate.write(teachRotate[i]);
}
if (teachGrab[i] < teachGrab[i+1]){
for (int j = teachGrab[i]; j<= teachGrab[i+1]; j++){
grab.write(j);
delay(stepSpeed);
}
}
else if (teachGrab[i] > teachGrab[i+1]){
for (int j = teachGrab[i]; j>= teachGrab[i+1]; j--){
grab.write(j);
delay(stepSpeed);
}
}
else{
grab.write(teachGrab[i]);
}
if (teachForwardBackward[i] < teachForwardBackward[i+1]){
for (int j = teachForwardBackward[i]; j<= teachForwardBackward[i+1]; j++){
forward_backward.write(j);
delay(stepSpeed);
}
}
else if (teachForwardBackward[i] > teachForwardBackward[i+1]){
for (int j = teachForwardBackward[i]; j>= teachForwardBackward[i+1]; j--){
forward_backward.write(j);
delay(stepSpeed);
}
}
else{
forward_backward.write(teachForwardBackward[i]);
}
if (teachUpDown[i] < teachUpDown[i+1]){
for (int j = teachUpDown[i]; j<= teachUpDown[i+1]; j++){
up_down.write(j);
delay(stepSpeed);
}
}
else if (teachUpDown[i] > teachUpDown[i+1]){
for (int j = teachUpDown[i]; j>= teachUpDown[i+1]; j--){
up_down.write(j);
delay(stepSpeed);
}
}
else{
up_down.write(teachUpDown[i]);
}
}
started=false;
}
//Change values if it's necessary...
void goHome(){
if (readForwardBackward < 80){
for (int j = readForwardBackward; j<=80; j++){
forward_backward.write(j);
delay(stepSpeed);
}
}
else if (readForwardBackward > 80){
for (int j = readForwardBackward; j>=80; j--){
forward_backward.write(j);
delay(stepSpeed);
}
}
else{
forward_backward.write(80);
}
if (readUpDown < 32){
for (int j = readUpDown; j<=32; j++){
up_down.write(j);
delay(stepSpeed);
}
}
else if (readUpDown > 32){
for (int j = readUpDown; j>=32; j--){
up_down.write(j);
delay(stepSpeed);
}
}
else{
up_down.write(32);
}
if (readRotate < 0){
for (int j = readRotate; j<=0; j++){
rotate.write(j);
delay(stepSpeed);
}
}
else if (readRotate > 0){
for (int j = readRotate; j>=0; j--){
rotate.write(j);
delay(stepSpeed);
}
}
else{
rotate.write(0);
}
if (readGrab < 148){
for (int j = readGrab; j<=148; j++){
grab.write(j);
delay(stepSpeed);
}
}
else if (readGrab > 148){
for (int j = readGrab; j>=148; j--){
grab.write(j);
delay(stepSpeed);
}
}
else{
grab.write(148);
}
//Always start from home position
teachForwardBackward[0]= 80;
teachUpDown[0]=32;
teachRotate[0]=0;
teachGrab[0]=148;
}
void goPot(){
if (0 > readRotate){
for (int j = 0; j>=readRotate; j--){
rotate.write(j);
delay(stepSpeed);
}
}
else if (readRotate > 0){
for (int j = 0; j<=readRotate; j++){
rotate.write(j);
delay(stepSpeed);
}
}
else{
rotate.write(readRotate);
}
if (readGrab > 148){
for (int j = 148; j<=readGrab; j++){
grab.write(j);
delay(stepSpeed);
}
}
else if (readGrab < 148){
for (int j = 148; j>=readGrab; j--){
grab.write(j);
delay(stepSpeed);
}
}
else{
grab.write(readGrab);
}
if (80 > readForwardBackward){
for (int j = 80; j>=readForwardBackward; j--){
forward_backward.write(j);
delay(stepSpeed);
}
}
else if (80 < readForwardBackward){
for (int j = 80; j<=readForwardBackward; j++){
forward_backward.write(j);
delay(stepSpeed);
}
}
else{
forward_backward.write(readForwardBackward);
}
if (32 > readUpDown){
for (int j = 32; j>=readUpDown; j--){
up_down.write(j);
delay(stepSpeed);
}
}
else if (readUpDown > 32){
for (int j = 32; j<=readUpDown; j++){
up_down.write(j);
delay(stepSpeed);
}
}
else{
up_down.write(readUpDown);
}
}
1 Likes
ชุดแขนกลรุ่นนี้สั่งซื้อได้ที่ไหน
1 Likes
ไม่มีขายครับแต่มีไฟล์ 3D เอาไปปริ้นด้วย 3D ออกมาได้ ถ้าไม่มีอาจต้องไปจ้างเขาปริ้นให้ครับ
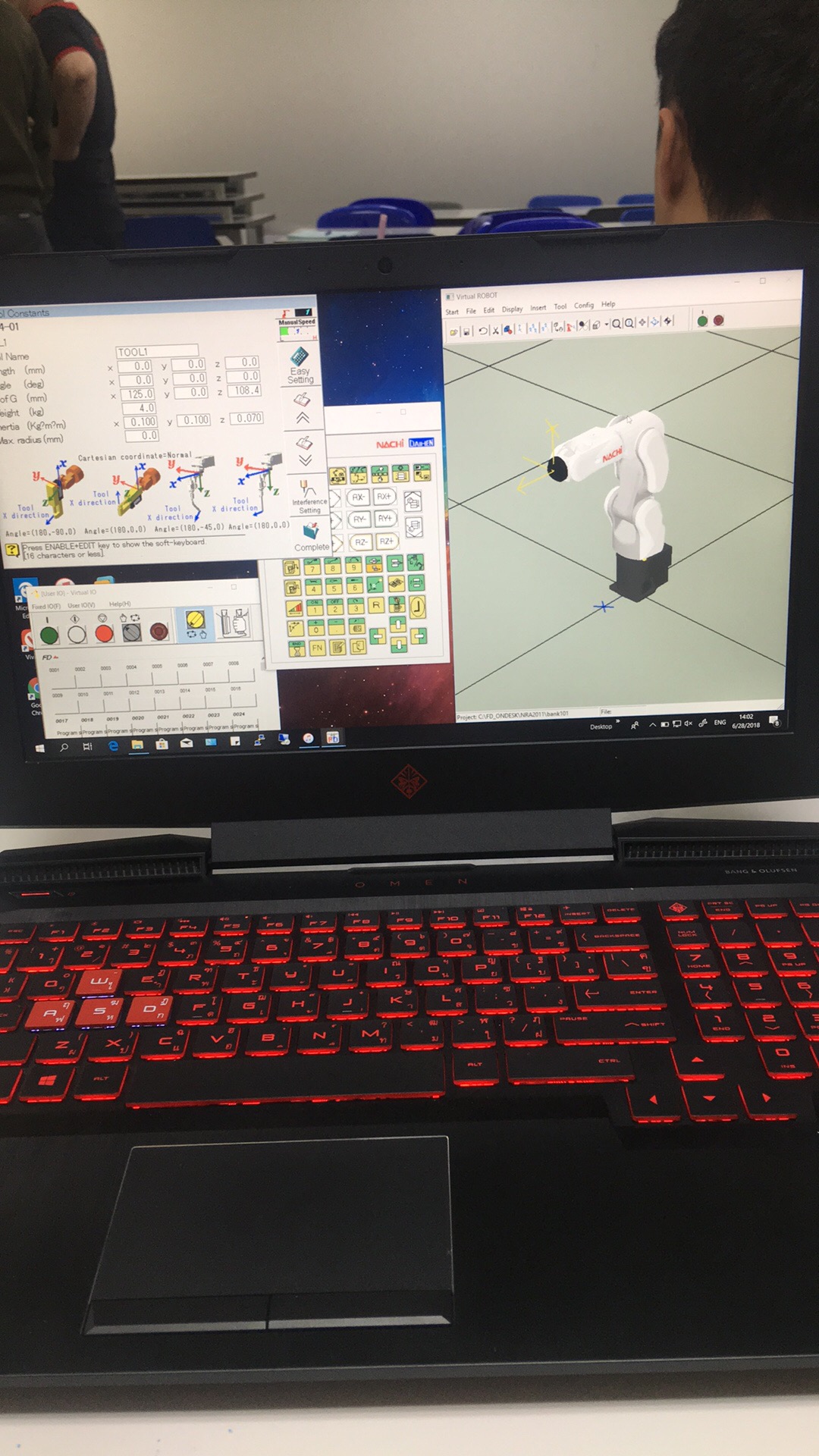
สนใจครับบอรด์arduinoรุ่นไหนไม่ชัดเจน แนะนำด้วยครับ ตัวแรกเป็น uno แต่ตัวหลังตัวที่จำตำแหน่งการเคลื่อนที่และมีกล่องดำควบคุมอยู่ใต้ฐานดูไม่ชัดครับ
ผมตอบไปแล้วนะครับ
ขอบคุณครับ
มีใครทำแขนกลเองบ้างครับ
กำลังจะทำครับ 555
อยากทำครับ แต่คงต้องศึกษาอีกนาน ถ้าแอดทำเสร็จเอามาสอนเป็นวิทยาทานด้วยครับ
กำลังจะซื้อสามดีปริ้นมาเพื่อการนี้เลยครับ เดียวได้แนวทางจะเอามาทำเป็นพาสๆ ลงให้ มีอุปกรณ์ขายให้ครบเลย ครับ
1 Likes
ช่วงนี้จะหายหน้าหายตาไปสักนิด ติดโปรเจคอื่นอยู่นะครับ 555
ทำตัวใหญ่ ใช้stepper moterเหมือนฝรั่งทำนะครับ อยากเห็น
ถามตั้งในกระเป๋าผมสักนิดนะคร้าาาพ 555

พัฒนาถึงไหนกันแล้ว น่าจะปรับปรุงแบบแขนกลให้สวยกว่านี้และแข็งแรงมีพลัง
