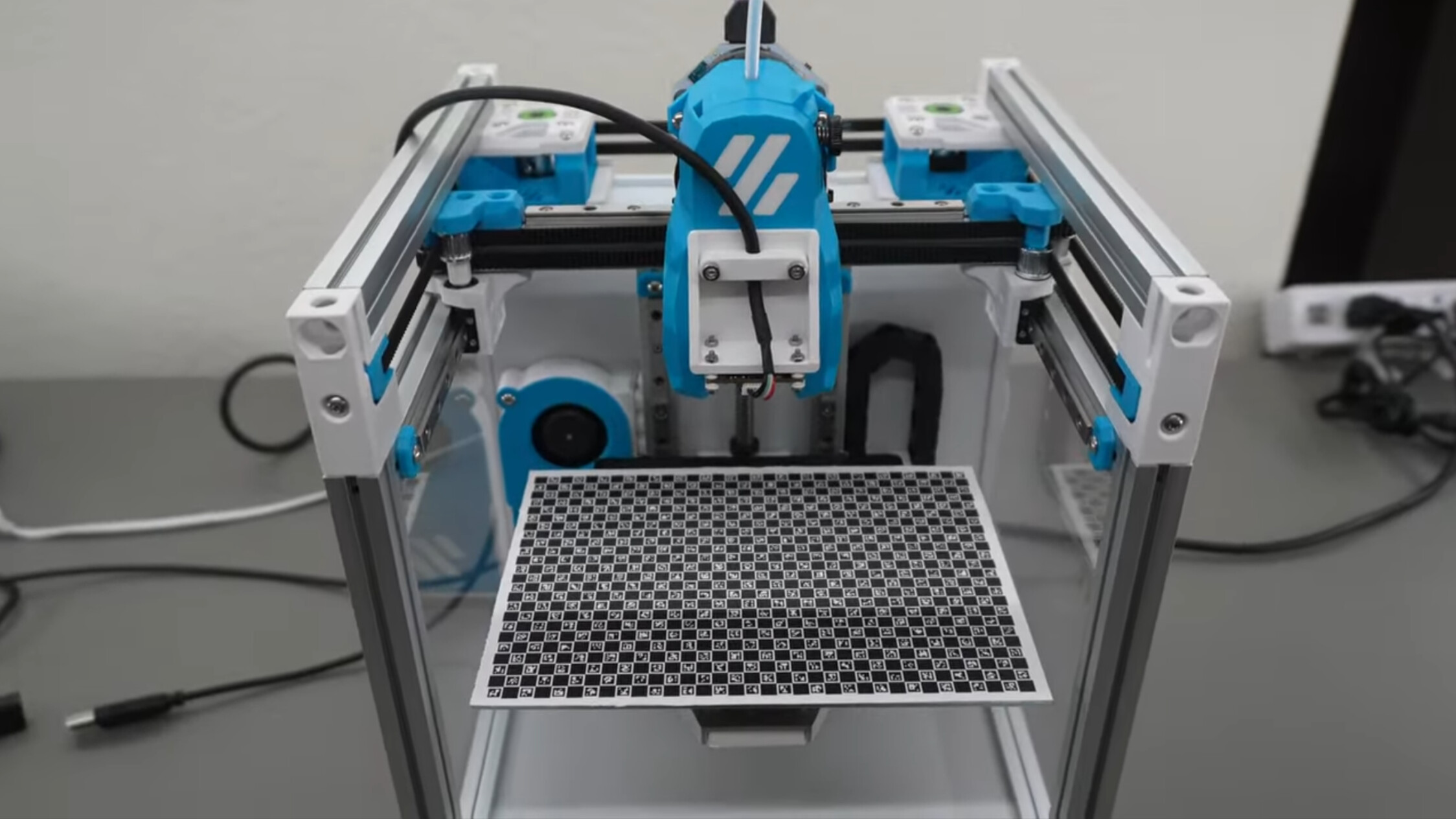
สำหรับการปรับเทียบแกนการเคลื่อนที่และความตั้งฉากที่อาจบิดเบี้ยว Dennis ใช้กล้องติดหัวพิมพ์ร่วมกับ ChArUco board บนฐานพิมพ์ ระบบจดจำภาพตรวจจับมุมของกระดาน ช่วยคำนวณตำแหน่งกล้องได้อย่างแม่นยำ และนำไปสร้างเมทริกซ์การแก้ไขที่แปลงจากตำแหน่งที่ระบบรายงาน ไปยังตำแหน่งจริงของหัวพิมพ์.
ส่วนการปรับระดับฐานพิมพ์ก็ซับซ้อนไม่แพ้กัน แม้จะใช้ PZ probe ตรวจจับการสัมผัสของหัวฉีดกับฐานพิมพ์แล้ว แต่การเคลื่อนที่เล็กน้อยหลังการสัมผัสยังคงเป็นปัญหา Dennis แก้ไขด้วยการให้ไมโครคอนโทรลเลอร์ในหัวพิมพ์บันทึกเวลาสัมผัสและส่งไปยัง Raspberry Pi ที่ทำหน้าที่เก็บข้อมูลเวลาและตำแหน่ง ทำให้สามารถระบุจุดสัมผัสที่แท้จริงได้.
หัวใจสำคัญของกระบวนการนี้คือการซิงโครไนซ์นาฬิกาของไมโครคอนโทรลเลอร์ทั้งสองส่วนให้แม่นยำถึง 1 ไมโครวินาที ซึ่ง Pi สามารถทำได้โดยใช้แพ็กเก็ต Start-of-Frame ของ USB ผลลัพธ์ที่ได้นั้นดูเป็นมืออาชีพอย่างยิ่ง และคาดว่าจะยิ่งดียิ่งขึ้นไปอีกเมื่อ Dennis ปรับจูนการอัดพลาสติกในขั้นตอนต่อไป.
🏷️ หมวดหมู่: 3d Printer hacks, Video Hacks, ArUco, auto bed leveling, calibration, charuco, computer vision, skew, synchronization
🔗 อ่านบทความฉบับเต็ม: hackaday
