ทำตัวใหญ่ ใช้stepper moterเหมือนฝรั่งทำนะครับ อยากเห็น
ถามตั้งในกระเป๋าผมสักนิดนะคร้าาาพ 555

พัฒนาถึงไหนกันแล้ว น่าจะปรับปรุงแบบแขนกลให้สวยกว่านี้และแข็งแรงมีพลัง
มีพลังอย่างเดียวไม่ได้ต้องมีตังด้วยครับ 555
เครื่องปริ้น3D ราคาไม่ถึงหมื่นแต่ความสามารถไม่มีข้อมูลมีใครเคยใช้บ้าง เอามาทำชิ้นส่วนแขนกลได้ง่ายเลย ราคาคงถูกลงเรื่อยๆเหมือนปริ้นเตอร์สีออกมาใหม่ๆแพงมาก
พบกันเร็วๆ นี้ครับ อิอิ
ตอนนี้กำลังทดสอบการทำงานของแขนกลใช้โค้ดตามที่มีให้แต่ต้องปรับค่าต่างๆให้เหมาะกับเซอร์โวที่ใช้ครับ
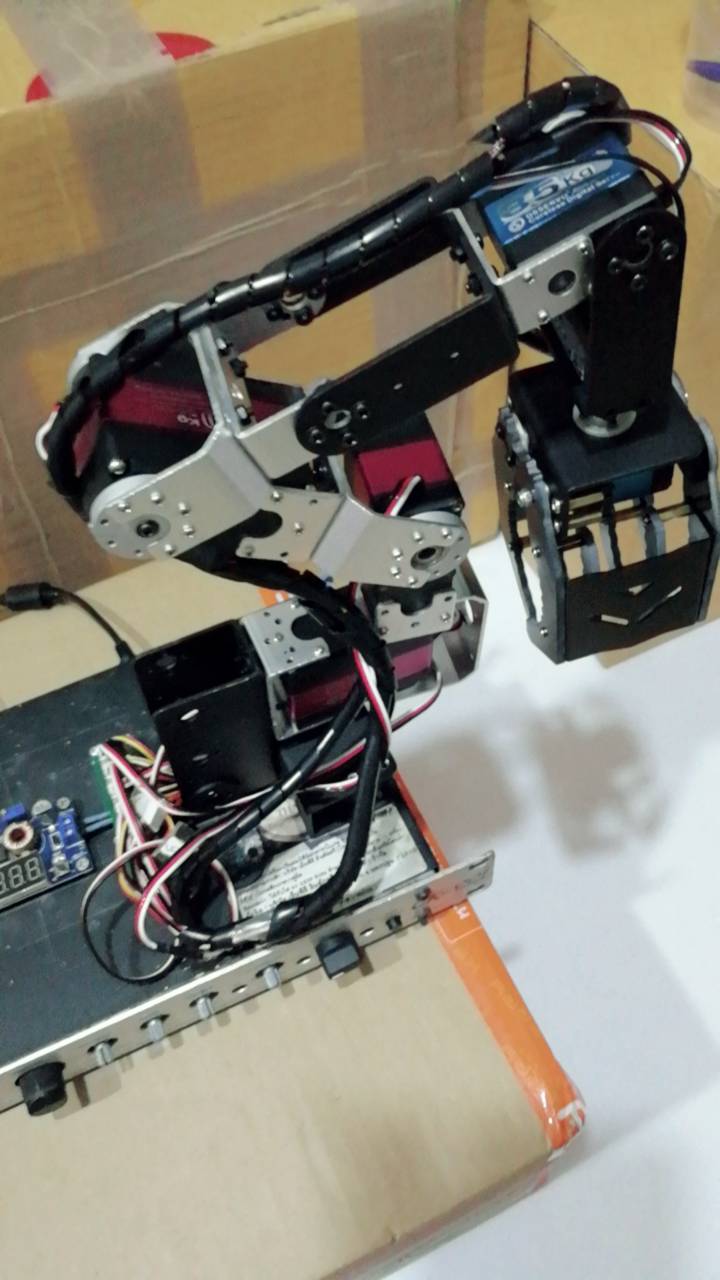
แขนรุ่นนี้ยังมีแต่โครงกระดูกไม่มีเสื้อใส่ให้สวยงาม
มีความรู้เรื่องโค้ดแนะนำด้วยครับ
จะถ่ายวีดีโอดูการทำงาน
/* Arduino Robotic Arm with Grab
* More info: http://www.ardumotive.com/
* arduino pro mini 328 broad
* Dev: Michalis Vasilakis Data: 12/12/2016 Ver: 1.1 */
#include <Servo.h>
//Create servo objects to control servo motors
Servo up_down; //servo3
Servo forward_backward;//servo6
Servo rotate;//servo2
Servo grab;//servo1
//เพิ่มเซอร์โว4,5
Servo up_down4;//servo4
Servo up_down5;//servo5
//Constants
const int startBT = 7;
const int teachBT = 8;
//2562-09-06 const int buzzer = 9;
const int buzzer;
const int potForwardBackward = A3;//servo6
const int potUpDown = A2;//servo3
const int potRotate = A1;//server2
const int potGrab = A0;//เซอร์โว1
//เพิ่มเซอร์โว2ตัว
const int potUpDown4 = A4;//เซอร์โว4
const int potUpDown5 = A5;//เซอร์โว5
//Max and Min values for servos ! Change them to meet your setup !
const int minGrab=180;
const int maxGrab=126;
const int minRotate=0;
const int maxRotate=100;
const int minUpDown=5;
const int maxUpDown=100;
const int minForwardBackward=160;
//const int maxForwardBackward=80;
const int maxForwardBackward=20;//25620911ทำให้องศาการหมุนเซอร์โวเพิ่มจาก90เป็น180องศาโดยประมาณ
//เพิ่มเซอร์โว4,5
const int minUpDown4=5;
const int maxUpDown4=100;
const int minUpDown5=5;
const int maxUpDown5=100;
//
//-------------------------------------//
//Variables ประกาศตัวแปร
int readUpDown,readForwardBackward,readRotate,readGrab,readTeach,readStart,readUpDown4,readUpDown5;
int teachUpDown[100],teachForwardBackward[100],teachRotate[100],teachGrab[100],teachUpDown4[100],teachUpDown5[100];
boolean started =false;
int index = 1;
//int stepSpeed = 20; //Change this to fo faster!
int stepSpeed = 10;//25620910
void setup() {
//Attach Servo motors
forward_backward.attach(3);
up_down.attach(4);
rotate.attach(5); //portokali xontro
grab.attach(6);
//เพิ่มเซอร์โว4,5
up_down4.attach(2);//servo4
up_down5.attach(9);//servo5
//Inputs-Outputs
pinMode(teachBT, INPUT_PULLUP);//pin8
pinMode(startBT, INPUT_PULLUP);//pin7
pinMode(buzzer, OUTPUT);//no pin
//Do a smooth movement on startup, from home potion to pot position:
readInputs();
goHome();
goPot();
Serial.begin(9600);
}
void loop() {
if (!started){
readInputs();
moveServos();
if (readTeach==LOW){
savePosition();
tone(buzzer,500);
delay(500);
noTone(buzzer);
}
if (readStart==LOW){
tone(buzzer,700);
started=true;
delay(1000);
noTone(buzzer);
}
}
else{
goHome();
runTeach();
}
}
void readInputs(){
//Read potentiometers of servo1-servo6 อ่านค่าปัจจุบันของตัวต้านทานปรับค่าได้
readUpDown = analogRead(potUpDown);//servo3
Serial.print("potUpDown=");
Serial.println(potUpDown);
//delay(1000);
readUpDown = map(readUpDown,0,1023,minUpDown,maxUpDown);
Serial.print("readUpDown=");
Serial.println(minUpDown);
Serial.println(maxUpDown);
//delay(1000);
readForwardBackward = analogRead(potForwardBackward);//servo6
Serial.print("readForwardBackward=");
Serial.println(readForwardBackward);
Serial.println(potForwardBackward);
//delay(1000);
readForwardBackward = map(readForwardBackward,0,1023,minForwardBackward,maxForwardBackward);
Serial.print("readForwardBackward=");
Serial.println(readForwardBackward);
Serial.println(minForwardBackward);
Serial.println(maxForwardBackward);
//delay(1000);
readRotate = analogRead(potRotate);//servo2
readRotate = map(readRotate,0,1023,minRotate,maxRotate);
readGrab = analogRead(potGrab);//servo1
readGrab = map(readGrab,0,1023,minGrab,maxGrab);
//เพิ่มเซอร์โว4,5
readUpDown4 = analogRead(potUpDown4);//servo4
readUpDown4 = map(readUpDown4,0,1023,minUpDown4,maxUpDown4);
readUpDown5 = analogRead(potUpDown5);//servo5
readUpDown5 = map(readUpDown5,0,1023,minUpDown5,maxUpDown5);
//Read buttons
readTeach = digitalRead(teachBT);
readStart = digitalRead(startBT);
delay(50);
}
void moveServos(){
up_down.write(readUpDown);
forward_backward.write(readForwardBackward);
rotate.write(readRotate);
grab.write(readGrab);
//เพิ่มเซอร์โว4,5
up_down4.write(readUpDown4);
up_down5.write(readUpDown5);
}
void savePosition(){
teachUpDown[index] = readUpDown;
teachForwardBackward[index] = readForwardBackward;
teachRotate[index] = readRotate;
teachGrab[index] = readGrab;
//เพิ่มเซอร์โว4,5
teachUpDown4[index] = readUpDown4;
teachUpDown5[index] = readUpDown5;
index++;
}
void runTeach(){
for (int i=0; i<index-1; i++)
{
//servo2 Rotate
if (teachRotate[i] < teachRotate[i+1])
{
for (int j = teachRotate[i]; j<= teachRotate[i+1]; j++)
{
rotate.write(j);
delay(stepSpeed);
}
}
else if (teachRotate[i] > teachRotate[i+1]){
for (int j = teachRotate[i]; j>= teachRotate[i+1]; j--){
rotate.write(j);
delay(stepSpeed);
}
}
else{
rotate.write(teachRotate[i]);
}
//servo1 Grab
if (teachGrab[i] < teachGrab[i+1]){
for (int j = teachGrab[i]; j<= teachGrab[i+1]; j++){
grab.write(j);
delay(stepSpeed);
}
}
else if (teachGrab[i] > teachGrab[i+1]){
for (int j = teachGrab[i]; j>= teachGrab[i+1]; j--){
grab.write(j);
delay(stepSpeed);
}
}
else{
grab.write(teachGrab[i]);
}
//servo6 ForwardBackward
if (teachForwardBackward[i] < teachForwardBackward[i+1]){
for (int j = teachForwardBackward[i]; j<= teachForwardBackward[i+1]; j++){
forward_backward.write(j);
delay(stepSpeed);
}
}
else if (teachForwardBackward[i] > teachForwardBackward[i+1]){
for (int j = teachForwardBackward[i]; j>= teachForwardBackward[i+1]; j--){
forward_backward.write(j);
delay(stepSpeed);
}
}
else{
forward_backward.write(teachForwardBackward[i]);
}
//servo3 UpDown
if (teachUpDown[i] < teachUpDown[i+1]){
for (int j = teachUpDown[i]; j<= teachUpDown[i+1]; j++){
up_down.write(j);
delay(stepSpeed);
}
}
else if (teachUpDown[i] > teachUpDown[i+1]){
for (int j = teachUpDown[i]; j>= teachUpDown[i+1]; j--){
up_down.write(j);
delay(stepSpeed);
}
}
else{
up_down.write(teachUpDown[i]);
}
//servo4 UpDown4
if (teachUpDown4[i] < teachUpDown4[i+1]){
for (int j = teachUpDown4[i]; j<= teachUpDown4[i+1]; j++){
up_down4.write(j);
delay(stepSpeed);
}
}
else if (teachUpDown4[i] > teachUpDown4[i+1]){
for (int j = teachUpDown4[i]; j>= teachUpDown4[i+1]; j--){
up_down4.write(j);
delay(stepSpeed);
}
}
else{
up_down4.write(teachUpDown4[i]);
}
//servo5 UpDown5
if (teachUpDown5[i] < teachUpDown5[i+1]){
for (int j = teachUpDown5[i]; j<= teachUpDown5[i+1]; j++){
up_down5.write(j);
delay(stepSpeed);
}
}
else if (teachUpDown5[i] > teachUpDown5[i+1]){
for (int j = teachUpDown5[i]; j>= teachUpDown5[i+1]; j--){
up_down5.write(j);
delay(stepSpeed);
}
}
else{
up_down5.write(teachUpDown5[i]);
}
}
started=false;
}
//Change values if it's necessary...
void goHome()
{
//servo6 ForwardBackward 160-80
if (readForwardBackward < 80){
for (int j = readForwardBackward; j<=80; j++){
forward_backward.write(j);
delay(stepSpeed);
}
}
else if (readForwardBackward > 80){
for (int j = readForwardBackward; j>=80; j--){
forward_backward.write(j);
delay(stepSpeed);
}
}
else{
forward_backward.write(80);
}
//servo3 UpDown 5-100
if (readUpDown < 32){
for (int j = readUpDown; j<=32; j++){
up_down.write(j);
delay(stepSpeed);
}
}
else if (readUpDown > 32){
for (int j = readUpDown; j>=32; j--){
up_down.write(j);
delay(stepSpeed);
}
}
else{
up_down.write(32);
}
//servo2 Rotate 0-100
if (readRotate < 0){
for (int j = readRotate; j<=0; j++){
rotate.write(j);
delay(stepSpeed);
}
}
else if (readRotate > 0){
for (int j = readRotate; j>=0; j--){
rotate.write(j);
delay(stepSpeed);
}
}
else{
rotate.write(0);
}
//servo1 Grab 180-126
if (readGrab < 148){
for (int j = readGrab; j<=148; j++){
grab.write(j);
delay(stepSpeed);
}
}
else if (readGrab > 148){
for (int j = readGrab; j>=148; j--){
grab.write(j);
delay(stepSpeed);
}
}
else{
grab.write(148);
}
//servo4 UpDown4 5-100
if (readUpDown4 < 32){
for (int j = readUpDown4; j<=32; j++){
up_down4.write(j);
delay(stepSpeed);
}
}
else if (readUpDown4 > 32){
for (int j = readUpDown4; j>=32; j--){
up_down4.write(j);
delay(stepSpeed);
}
}
else{
up_down4.write(32);
}
//servo5 UpDown5 5-100
if (readUpDown5 < 32){
for (int j = readUpDown5; j<=32; j++){
up_down5.write(j);
delay(stepSpeed);
}
}
else if (readUpDown5 > 32){
for (int j = readUpDown5; j>=32; j--){
up_down5.write(j);
delay(stepSpeed);
}
//Always start from home position จุดเริ่มต้นไปตำแหน่งใหม่
teachForwardBackward[0]= 80;
teachUpDown[0]=32;
teachRotate[0]=0;
teachGrab[0]=148;
//เพิ่มเซอร์โว4,5
teachUpDown4[0]=32;
teachUpDown5[0]=32;
}
}
//ไปยังตำแหน่งที่ต้องการ
void goPot(){
//servo2 Rotate
if (0 > readRotate){
for (int j = 0; j>=readRotate; j--){
rotate.write(j);
delay(stepSpeed);
}
}
else if (readRotate > 0){
for (int j = 0; j<=readRotate; j++){
rotate.write(j);
delay(stepSpeed);
}
}
else{
rotate.write(readRotate);
}
//servo1 Grab
if (readGrab > 148){
for (int j = 148; j<=readGrab; j++){
grab.write(j);
delay(stepSpeed);
}
}
else if (readGrab < 148){
for (int j = 148; j>=readGrab; j--){
grab.write(j);
delay(stepSpeed);
}
}
else{
grab.write(readGrab);
}
//servo6 ForwardBackward
if (80 > readForwardBackward){
for (int j = 80; j>=readForwardBackward; j--){
forward_backward.write(j);
delay(stepSpeed);
}
}
else if (80 < readForwardBackward){
for (int j = 80; j<=readForwardBackward; j++){
forward_backward.write(j);
delay(stepSpeed);
}
}
else{
forward_backward.write(readForwardBackward);
}
//servo3 UpDown
if (32 > readUpDown){
for (int j = 32; j>=readUpDown; j--){
up_down.write(j);
delay(stepSpeed);
}
}
else if (readUpDown > 32){
for (int j = 32; j<=readUpDown; j++){
up_down.write(j);
delay(stepSpeed);
}
}
else{
up_down.write(readUpDown);
}
//เพิ่มเซอร์โว4,5
//servo4 UpDown4
if (32 > readUpDown4){
for (int j = 32; j>=readUpDown4; j--){
up_down4.write(j);
delay(stepSpeed);
}
}
else if (readUpDown4 > 32){
for (int j = 32; j<=readUpDown4; j++){
up_down4.write(j);
delay(stepSpeed);
//25620910เพิ่มหน่วยเวลา
delay(stepSpeed);
}
}
else{
up_down4.write(readUpDown4);
//25620910เพิ่มหน่วยเวลา
delay(stepSpeed);
delay(stepSpeed);
}
//servo5 UpDown5
if (32 > readUpDown5){
for (int j = 32; j>=readUpDown5; j--){
up_down5.write(j);
//25620910เพิ่มหน่วยเวลา
delay(stepSpeed);
delay(stepSpeed);
}
}
else if (readUpDown5 > 32){
for (int j = 32; j<=readUpDown5; j++){
up_down5.write(j);
//25620910เพิ่มหน่วยเวลา
delay(stepSpeed);
}
}
else{
up_down5.write(readUpDown5);
//25620910เพิ่มหน่วยเวลา
delay(stepSpeed);
}
}
1 Likes

สนใจครับ คิดถึงโทนี่ สตาร์ก ภาคแรก ประมาณวางของบนโต๊ะไม่เป็นที่ แล้วให้ Arm Robot เก็บให้เอง
รอชมครับ ติดปัญหาตรงไหน บอกได้เลยเดียวช่วยกัน แก้ ส่วนเนื้อหาตั้งกระทู้ใหม่เลย ก็ดีครับ จะได้ focus เนื้อหา รู้สึกกระทู้นี้ยาวละ 555
พรุ่งนี้จะถ่ายการเคลื่อนไหว
โค้ดใช้งานได้จริงครับแต่มีปัญหาหลังอับโหลดโค้ดจะมีการเคลื่อนไหวเองทันทีไม่สวยงามถ้าแก้ได้จะควบคุมให้สวยกว่านี้
2.เมื่อสอนการเคลื่อนที่ของแขนไปตำแหน่งที่ต้องการเมื่อกดให้แขนเริ่มทำงานจะมีการเคลื่อนของแขนเกินกว่าที่สอนใว้เสียเวลาและเคลื่อนที่เกินแนวที่กำหนดใช้งานจริงอาจจะชนได้
3.เซอร์โวส่งกำลังโดยตรงอายุใช้งานสั้นพังเร็วถ้ามีโครงแขนกลแข็งแรงส่งกำลังผ่านเฟือง ลิงค์ มีความแม่ยำ ราคาไม่เเพง แนะนำ ด้วยและการปรับแต่โค้ด
ต้นแบบ4ตัว ผมใช้6ตัวเพิ่มโค้ด 60กก3ตัว35กก3ตัว
User ใหม่ ระบบไม่ให้อับโหลดvdo พรุ่งนี้จะถ่ายและส่งทันทีอาจจะได้ครับ
รุ่น1ทดสอบการควบคุมใช้ขาบอร์ดA0-A5,2,3,4,5,6,7,8,9 เหลือขาA6-A7,10,11,12,13
รุ่น2จะแข็งแรงว่องไวกว่านี้
4.อยากให้สามารถเก็บค่าที่เราสอนใว้ได้เมื่อเปิดสวิทช์ให้ทำงานทันที
5.การเคลื่อนของแขนถ้ามีการสอนช้ำโดยไม่ปิดสวิทช์จะมีการบันทึกต่อจากข้อมูลเดิมทำให้แขนกลทำงานหลายรอบถ้าเพิ่มโค้ดรีเซตข้อมูลโดยไม่ปิดสวิทช์น่าจะดี
6. คำสั่ง Serial Moniter มีประโยชน์มาก มีเทคนิคการใช้งานแนะนำด้วยครับ
มีข้อมูลดีๆแนะนำด้วยครับ
1 Likes
ยกทั้งชุดนี้ ตั้งกระทู้ใหม่เลยครับ น่าจะดีเบตกันยาว วีดีโอตอนี้ยังไม่ได้เปิดให้อัพยาวๆ ครับ เพราะมันหนัก server เลยให้ใช้วิธี อัพลง youtube แล้วเอาลิ้งค์มาแปะ ดูได้เหมือนกันครับ
ได้ครับตั้งกระทู้ใหม่
พี่ครับ มีไลหรอเฟส ติดต่อมั้ยครับ ผมขอสอบถามเรื่องแขนกลได้ไหมครับ ผมไม่รู้ว่าต้องใช้อุปกรเสริมยังไงบ้าง
คือจะเสริมยังไงครับ
ออกความเห็นได้เลยครับ ผมจะได้หาแนวทางเริ่มพัฒนาต่อ
