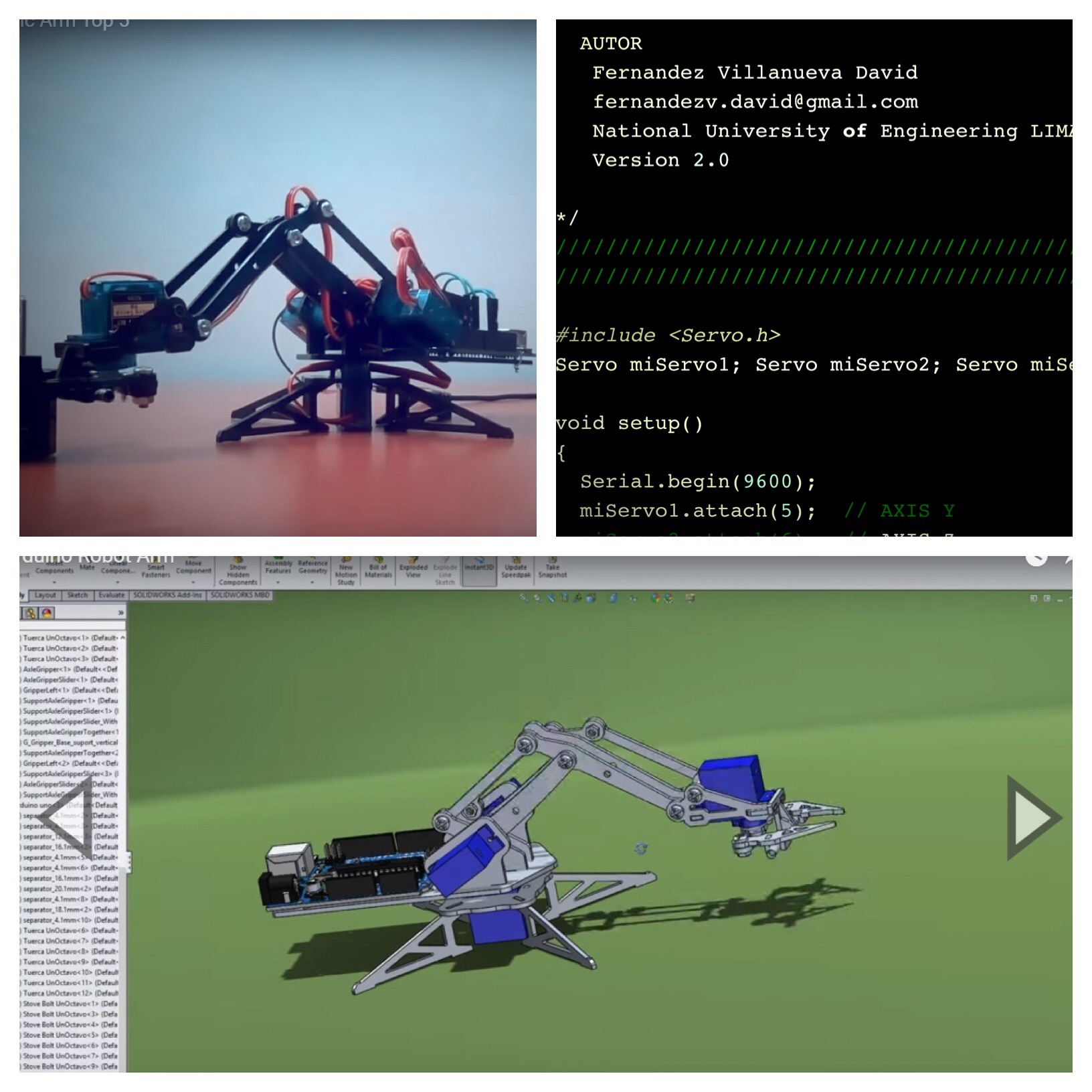
โค้ดเต็ม Robot_Arm_V2.1 เดียวมีเวลามาช่วยพี่แกะโค้ดกันนะครับ แล้วเราจะใช้เว็บ IDE sim ผลออกมาดูกัน
///////////////////////////////////////////////////////
/*
Robot movement is based on the principle of inverse kinematics
OPERATION
Format:
1. Any coordinate:
{x, y, z}
* -10 <= x <= 10
* 1 <= y <= 10
* 0 <= z <= 6
2. Tiempo de espera:
{0.001, 0.001, T}
* 0.001: reserved for a wait time.
* "T" is the wait time, in milliseconds
3. Open and close GRIPPER
{0.002, 0.002, G}
* 0.002: reserved for open/close gripper.
* 60 <= G <= 125 (G: degree sexagesimal)
EXAMPLE:
{-5, 0, 6.5}, // initial position
{0.001, 0.001, 200}, // wait 200 milliseconds
{-5, 0, -1}, // nex position
{0.001, 0.001, 200}, // wait 200 milliseconds
{-8.5, 0, -1}, // nex position
{0.001, 0.001, 1000}, // wait 1000 milliseconds (1 second)
{0.002, 0.002, 35}, // close gripper
{0.001, 0.001, 1000}, // wait 1000 milliseconds (1 second)
{-5, 0, 0}, // nex position
{0.001, 0.001, 200}, // wait 200 milliseconds
{-5, 0, 6.5}, // nex position
{0.001, 0.001, 200}, // wait 200 milliseconds
{5, 0, 6.5}, // nex position
{0.001, 0.001, 200}, // wait 200 milliseconds
{8.5, 0, 6.5}, // nex position
{0.001, 0.001, 1000}, // wait 1000 milliseconds (1 second)
{0.002, 0.002, 90}, // open gripper
{0.001, 0.001, 2000}, // wait 2000 milliseconds (2 second)
{5, 0, 6.5}, // nex position
{0.001, 0.001, 200}, // wait 200 milliseconds
{-5, 0, 6.5}, // initial position (It is going to the starting point to start a new cycle)
AUTOR
Fernandez Villanueva David
fernandezv.david@gmail.com
National University of Engineering LIMA-PERU
Version 2.0
*/
///////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
#include <Servo.h>
Servo miServo1; Servo miServo2; Servo miServo3; Servo miServo4;
void setup()
{
Serial.begin(9600);
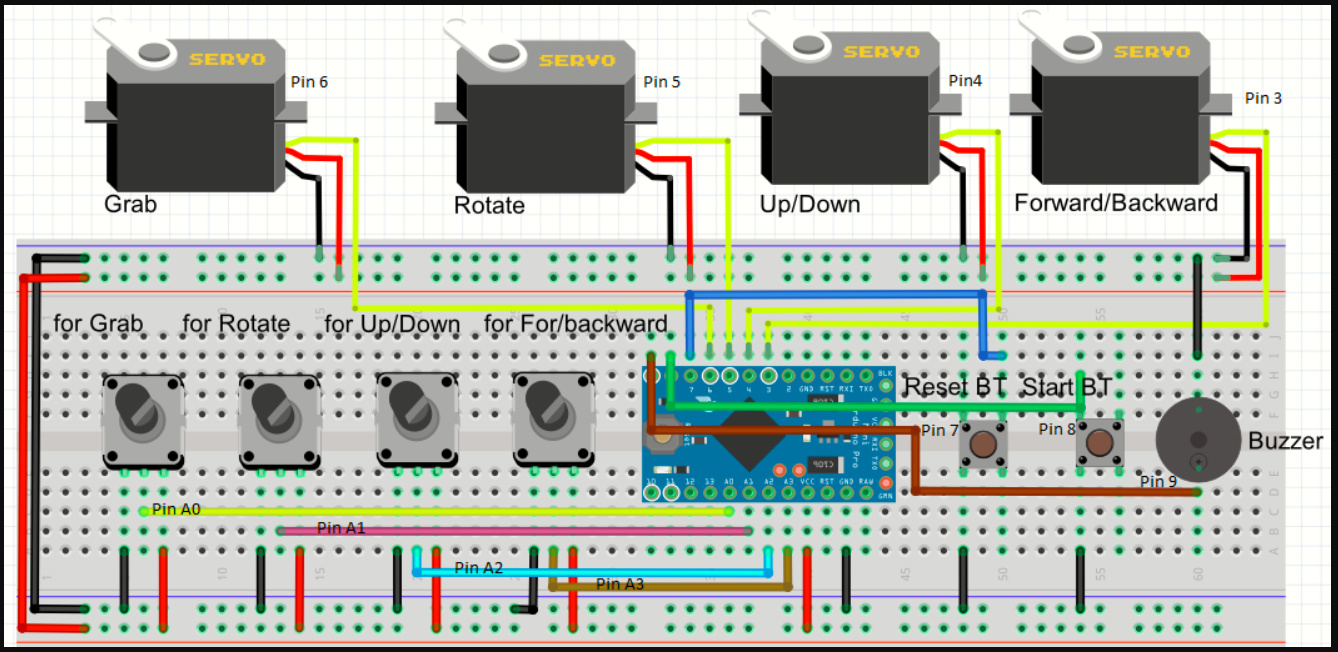
miServo1.attach(5); // AXIS Y
miServo2.attach(6); // AXIS Z
miServo3.attach(9); // GRIPPER
miServo4.attach(10); // X
}
double X[] = {5, 0, -5};
double Y[] = {5, 5, 5};
double Z[] = {2, 2, 2};
//{00.00, 08.05, 02.00},
int speed_mov = 5;
const int num_xyz = 21;
///////////////////////////////////////////////////////////////////
double coordinates[num_xyz][3] = {
//HEAR SHOULD WRITE THE COORDINATES
{-5, 0, 6.5},
{0.001, 0.001, 200},
{-5, 0, -1},
{0.001, 0.001, 200},
{-8.5, 0, -1},
{0.001, 0.001, 1000},
{0.002, 0.002, 35},
{0.001, 0.001, 1000},
{-5, 0, 0},
{0.001, 0.001, 200},
{-5, 0, 6.5},
{0.001, 0.001, 200},
{5, 0, 6.5},
{0.001, 0.001, 200},
{8.5, 0, 6.5},
{0.001, 0.001, 1000},
{0.002, 0.002, 90},
{0.001, 0.001, 2000},
{5, 0, 6.5},
{0.001, 0.001, 200},
{-5, 0, 6.5},
// END COORDINATES
};
/////////////////////////////////////////////////////////////////
const int mum_X = sizeof(X) / 4;
//double theta1[mum_X];
//double theta2[mum_X];
//double theta3[mum_X];
double theta1[num_xyz];
double theta2[num_xyz];
double theta3[num_xyz];
int alpha1, alpha2, alpha3, alpha4;
int vect_with_coord[num_xyz];
int c_theta1_2_3[num_xyz][4];
//int next_point_rate[11][6];
float next_point_rate[num_xyz][7];
const float pi = 3.14;
double L1 = 0;
double L2 = 6;
double L3 = 5.5;
double x, y, z;
double q11, q22, q33;
float h, c, alpha, ganma, q1, q2, q3;
int cont = 0;
double num_prueba = -10.9;
double num_abs;
int num_coord = 0;
//////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////
void loop()
{
inv_kinematics();
rate_add();
delay(1000);
while (1)
{
path_fin();
}
}
//////////////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////
double inv_kinematics()
{
for (int i = 0; i < num_xyz; i++) // coordinates[0][0]
{
if ((coordinates[i][0] == coordinates[i][1]) && (coordinates[i][0] == 0.001))
{
c_theta1_2_3[i][0] = 1;
c_theta1_2_3[i][1] = (int)(coordinates[i][2]);
c_theta1_2_3[i][2] = (int)(coordinates[i][2]);
c_theta1_2_3[i][3] = (int)(coordinates[i][2]);
}
else if ((coordinates[i][0] == coordinates[i][1]) && (coordinates[i][0] == 0.002))
{
c_theta1_2_3[i][0] = 2;
c_theta1_2_3[i][1] = (int)(coordinates[i][2]);
c_theta1_2_3[i][2] = (int)(coordinates[i][2]);
c_theta1_2_3[i][3] = (int)(coordinates[i][2]);
}
else
{
x = coordinates[i][0];
y = coordinates[i][1];
z = coordinates[i][2];
h = sqrt(pow(x, 2) + pow(y, 2));
c = sqrt(pow(x, 2) + pow(y, 2) + pow((z - L1), 2));
alpha = acos((pow(L2, 2) + pow(c, 2) - pow(L3, 2)) / (2 * L2 * c));
ganma = atan((z - L1) / (x));
q1 = atan(y / x) * 180 / pi;
q2 = (atan((z - L1) / (h)) + alpha) * 180 / pi;
q3 = (acos((pow(c, 2) - pow(L2, 2) - pow(L3, 2)) / (2 * L2 * L3))) * 180 / pi;
if (x < 0)
{
q11 = 180 + (int)(q1); //(int)(q1);
}
else
{
q11 = (int)(q1); //(int)(q1);
}
q22 = (int)(q2); //(int)(q2);
q33 = (int)(q3); //(int)(q3);
c_theta1_2_3[i][0] = 0;
c_theta1_2_3[i][1] = q11;
c_theta1_2_3[i][2] = q22;
c_theta1_2_3[i][3] = q33;
theta1[i] = q11;
theta2[i] = q22;
theta3[i] = q33;
cont = cont + 1;
}
}
//comprueva_array2();
}
double absoluto(double num1)
{
if (num1 < 0)
{
return (-1) * num1;
}
else
{
return num1;
}
}
void rate_add()
{ //int next_point_rate[11][6];
int cont_rate_add = 0;
int first_coord = 0;
//int vect_with_coord[11];
int num_no_coord = 0;
//int num_coord=0;
for (int j = 0; j < num_xyz; j++)
{
if (c_theta1_2_3[j][0] == 0)
{
vect_with_coord[num_coord] = j;
num_coord = 1 + num_coord; // número de coordenadas "0".
}
else
{
//vect_with_coord[10 - num_no_coord] = 99;
vect_with_coord[(num_xyz-1) - num_no_coord] = 99;
num_no_coord = num_no_coord + 1;
}
}
// rate calculate
int cont_num_coord = 0;
for (int i = 0; i < num_xyz; i++)
{
if (c_theta1_2_3[i][0] == 0)
{
if (i == vect_with_coord[num_coord - 1])
{
int k0 = vect_with_coord[cont_num_coord];
int k1 = vect_with_coord[0];
next_point_rate[i][0] = c_theta1_2_3[k1][1] - c_theta1_2_3[k0][1];
next_point_rate[i][1] = c_theta1_2_3[k1][2] - c_theta1_2_3[k0][2];
next_point_rate[i][2] = c_theta1_2_3[k1][3] - c_theta1_2_3[k0][3];
int maxim_tree_val = max_tree(next_point_rate[i][0], next_point_rate[i][1], next_point_rate[i][2]);
next_point_rate[i][3] = next_point_rate[i][0] / maxim_tree_val;
next_point_rate[i][4] = next_point_rate[i][1] / maxim_tree_val;
next_point_rate[i][5] = next_point_rate[i][2] / maxim_tree_val;
next_point_rate[i][6] = maxim_tree_val;
cont_num_coord = cont_num_coord + 1;
}
else
{
int k0 = vect_with_coord[cont_num_coord];
int k1 = vect_with_coord[cont_num_coord + 1];
next_point_rate[i][0] = c_theta1_2_3[k1][1] - c_theta1_2_3[k0][1];
next_point_rate[i][1] = c_theta1_2_3[k1][2] - c_theta1_2_3[k0][2];
next_point_rate[i][2] = c_theta1_2_3[k1][3] - c_theta1_2_3[k0][3];
int maxim_tree_val = max_tree(next_point_rate[i][0], next_point_rate[i][1], next_point_rate[i][2]);
next_point_rate[i][3] = next_point_rate[i][0] / maxim_tree_val;
next_point_rate[i][4] = next_point_rate[i][1] / maxim_tree_val;
next_point_rate[i][5] = next_point_rate[i][2] / maxim_tree_val;
next_point_rate[i][6] = maxim_tree_val;
cont_num_coord = cont_num_coord + 1;
}
}
}
}
int max_tree(int num1, int num2, int num3)
{
if (num1 < 0) {
num1 = num1 * (-1);
}
if (num2 < 0) {
num2 = num2 * (-1);
}
if (num3 < 0) {
num3 = num3 * (-1);
}
int borra = max(num1, num2);
int maxim_tree = max(borra, num3);
return maxim_tree;
}
void path_fin()
{
int inicio = 0;
for (int i = 0; i < num_xyz; i++)
{ ///////////
if (c_theta1_2_3[i][0] == 0)
{
if (inicio == 0) //first loop
{
delay(speed_mov);
alpha1 = (int)(c_theta1_2_3[i][1]);
alpha2 = (int)(c_theta1_2_3[i][2]);
alpha3 = (int)(c_theta1_2_3[i][3]);
miServo4.write(43+alpha2);
miServo1.write(55+(alpha3-alpha2));
miServo2.write(alpha1);
}
else
{
int netxc = vect_with_coord[inicio - 1];
for (int j = 1; j <= next_point_rate[netxc][6]; j++)
{
delay(speed_mov);
alpha1 = (int)(c_theta1_2_3[netxc][1] + j * next_point_rate[netxc][3]);
alpha2 = (int)(c_theta1_2_3[netxc][2] + j * next_point_rate[netxc][4]);
alpha3 = (int)(c_theta1_2_3[netxc][3] + j * next_point_rate[netxc][5]);
miServo4.write(43+alpha2);
miServo1.write(55+(alpha3-alpha2));
miServo2.write(alpha1);
}
}
inicio = inicio + 1;
}
else if (c_theta1_2_3[i][0] == 1)// retardo
{
delay(c_theta1_2_3[i][2]);
//Serial.println(c_theta1_2_3[i][2]);
//delay(500);
}
else
{
int gripper_g = (int)(c_theta1_2_3[i][2]);
miServo3.write(gripper_g);
//int miServo3();
}
//
}// end for
}