“อยากขอ คำเเนะนำ” เกี่ยวกับ " บอร์ดอาดูโน่กับ เซอร์โว"หน่อยคับ
จะทำอะไรครับอธิบายหน่อย??
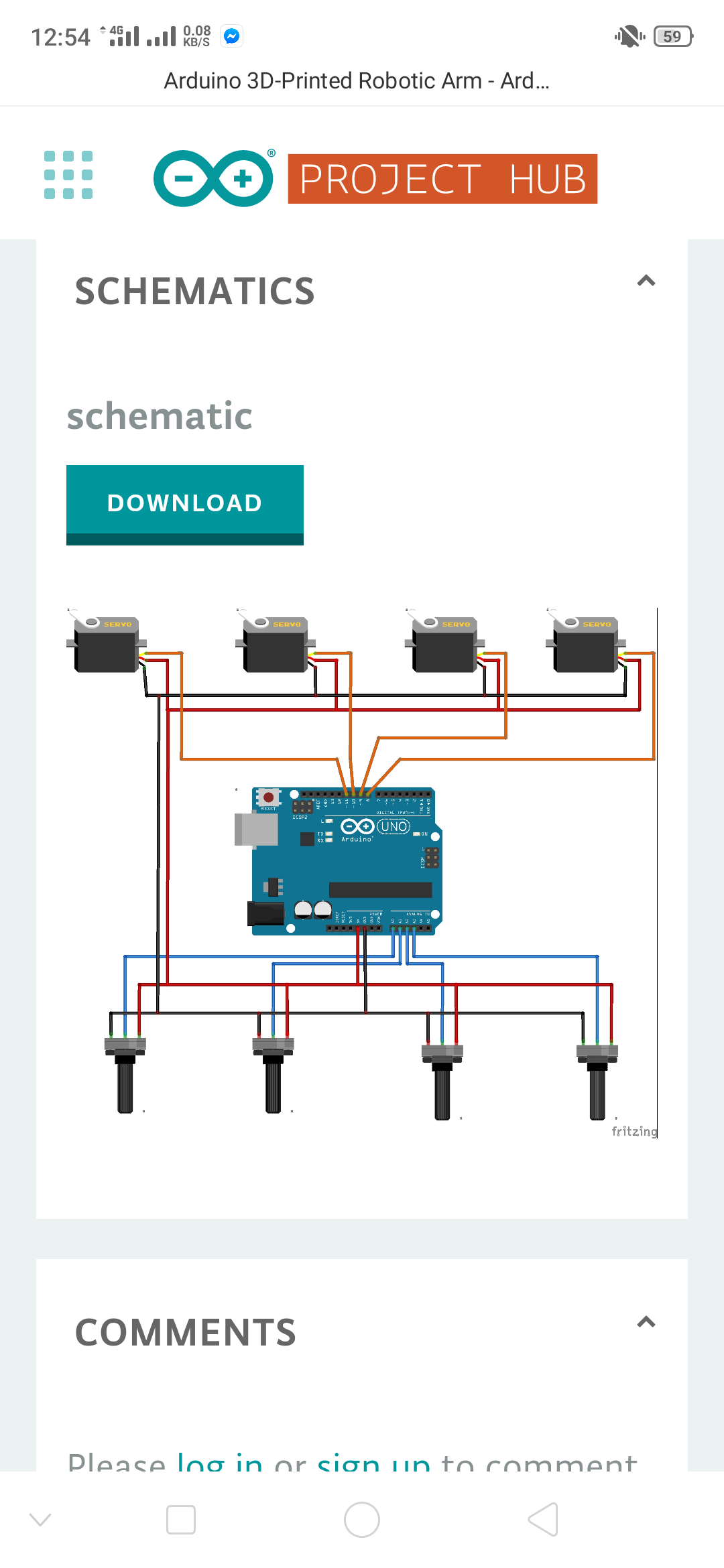
เวลาต่อเซอโวเข้า4ตัวบอร์ดเเล้วบอร์ดดับคับ
ต่อ 2 ตัวดับไหมครับ ใช้เซอร์โวตัวไหนถ่ายมาดูหน่อย

ลองดูยังครับ
ติดคับเเต่มันไม่ทำงานครับ ผมทำแขนกลจะเครื่องปริ๊นแบบพี่อ่ะคับ
ใช้โค้ตอะไรครับ แสดงว่าเป็นที่ code ทดสอบเอาแค่ servo ตัวเดียวหมุนได้รึยัง ควบคุมได้รึป่าว
ตัวเดียวทำงานได้ครับ
กระแสไม่พอครับ หาแหล่งจ่ายไฟ แยกออกมาต่างหากเลย ทั้งสี่ตัว
ถ้ายังไม่ได้นี่คงเป็นที่โค๊คใช่ไหมคับ
#include <Servo.h>
Servo myservo; // create servo object to control a servo
Servo myservo1;
Servo myservo2;
Servo myservo3;
int potpin = 0;// analog pin used to connect the potentiometer
int potpin1 = 1;
int potpin2 = 2;
int potpin3 = 3;
int val; // variable to read the value from the analog pin
int val1;
int val2;
int val3;
void setup() {
myservo.attach(8); // attaches the servo on pin 8 to the servo object
myservo.attach(9);
myservo.attach(10);
myservo.attach(11);
}
void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
val1 = analogRead(potpin1);
val1 = map(val1, 0, 1023, 0, 180);
myservo1.write(val1);
delay(15);
val2 = analogRead(potpin2);
val2 = map(val2, 0, 1023, 0, 180);
myservo2.write(val2);
delay(15);
val3 = analogRead(potpin3);
val2 = map(val3, 0, 1023, 0, 180);
myservo3.write(val3);
delay(15);
}
#include <Servo.h>
Servo myservo; // create servo object to control a servo
Servo myservo1;
Servo myservo2;
Servo myservo3;
int potpin = 0;// analog pin used to connect the potentiometer
int potpin1 = 1;
int potpin2 = 2;
int potpin3 = 3;
int val; // variable to read the value from the analog pin
int val1;
int val2;
int val3;
void setup() {
myservo.attach(8); // attaches the servo on pin 8 to the servo object
myservo.attach(9);
myservo.attach(10);
myservo.attach(11);
pinMode(potpin, INPUT);
pinMode(potpin1, INPUT);
pinMode(potpin2, INPUT);
pinMode(potpin3, INPUT);
}
void loop() {
val = analogRead(potpin); // reads the value of the potentiometer (value between 0 and 1023)
val = map(val, 0, 1023, 0, 180); // scale it to use it with the servo (value between 0 and 180)
myservo.write(val); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
val1 = analogRead(potpin1);
val1 = map(val1, 0, 1023, 0, 180);
myservo1.write(val1);
delay(15);
val2 = analogRead(potpin2);
val2 = map(val2, 0, 1023, 0, 180);
myservo2.write(val2);
delay(15);
val3 = analogRead(potpin3);
val2 = map(val3, 0, 1023, 0, 180);
myservo3.write(val3);
delay(15);
}
เบื้องต้นลองเพิ่ม pinMode กำหนดเป็น รับ input ลองดูว่าได้ไหม อธิบายด้วยครับว่าไม่ได้จากอะไร หมุน R แต่ละตัวแล้วผลเป็นอย่างไร ขยับไหม อาการเป็นอย่างไร
อธิบายไม่ถูกก็ถ่ายเป็น คลิปมาก็ได้
ครับ เดะผมจะลองทำตามคนรับ
1 Likes
อันนี้ทำอะไรเพิ่มไปครับ ตัวแขนสั่งซื้อที่ไหนมาราคาเท่าไหร่
ทำเองครับ หมดเลยครับ
ใช้ 3D พิมพ์ ออกมาเลยใช่ไหมครับ
ครับ ปริ๊นเองเลยครับ
1 Likes
