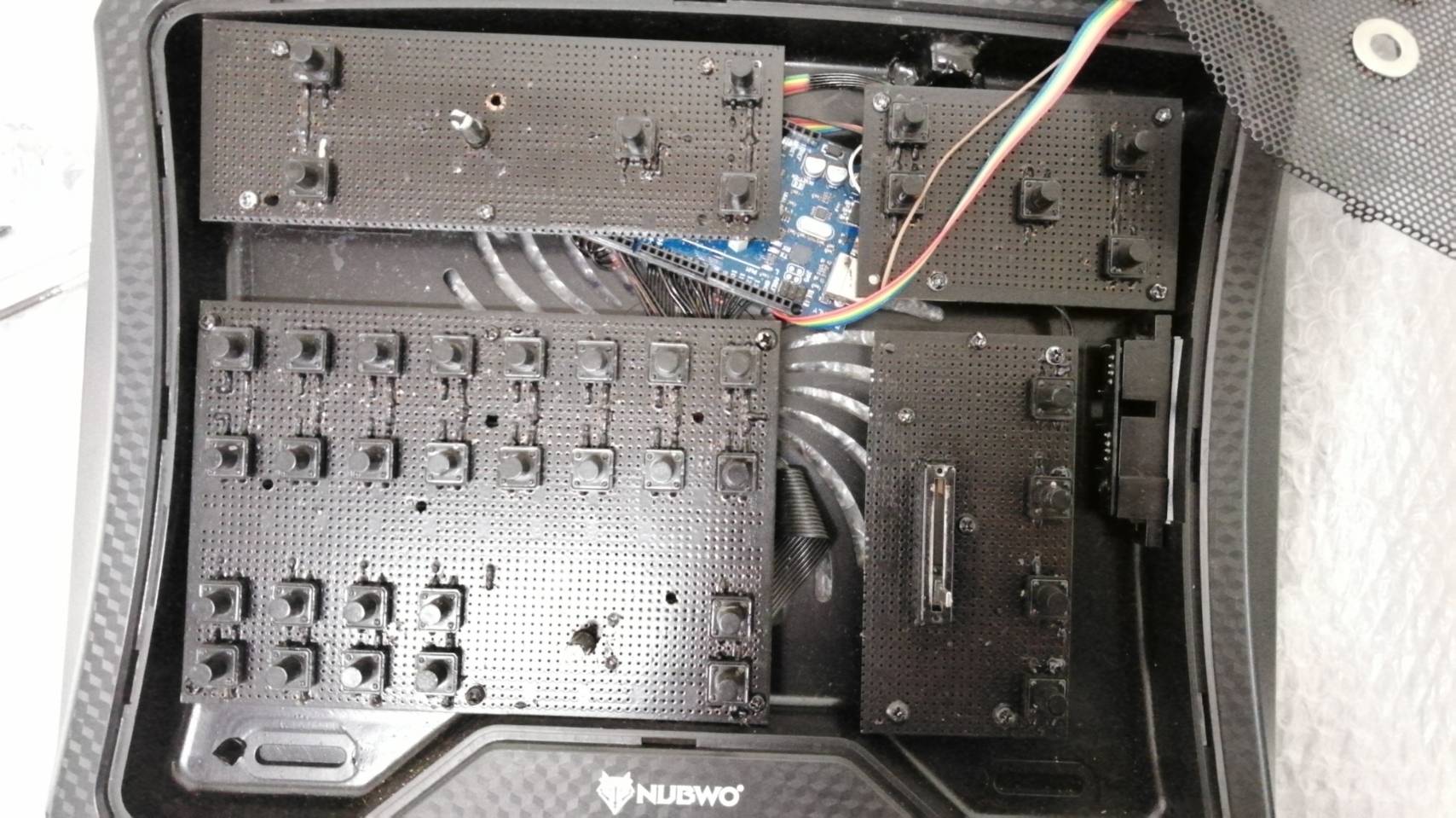
ก่อนอื่นเรามาดูภาพรวมของระบบกันก่อนครับ (พอดีช่วงนี้ผมมีเวลาครับ จึงอยากทำตัวให้มีประโยชน์กับผู้อื่นบ้าง)
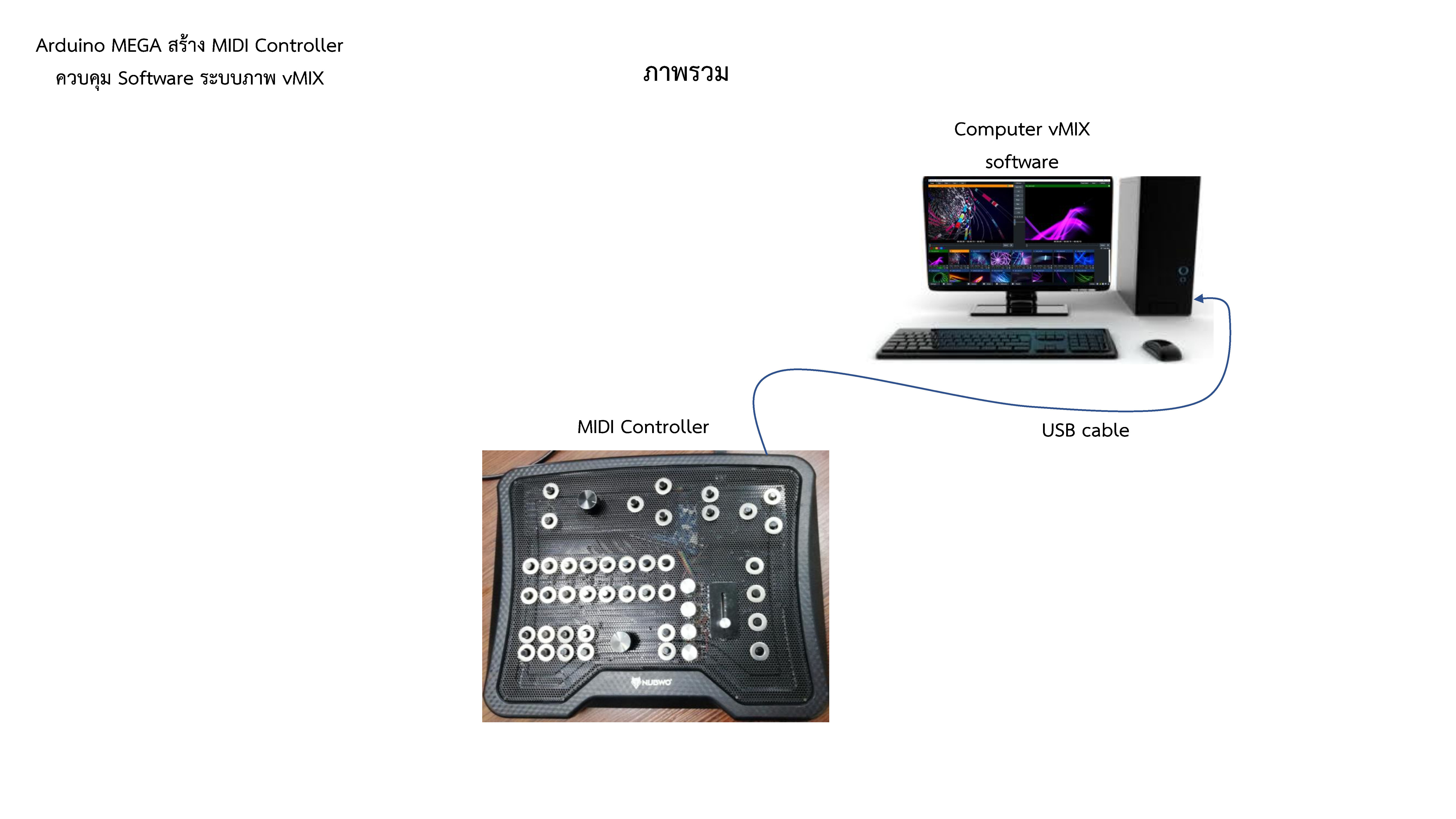
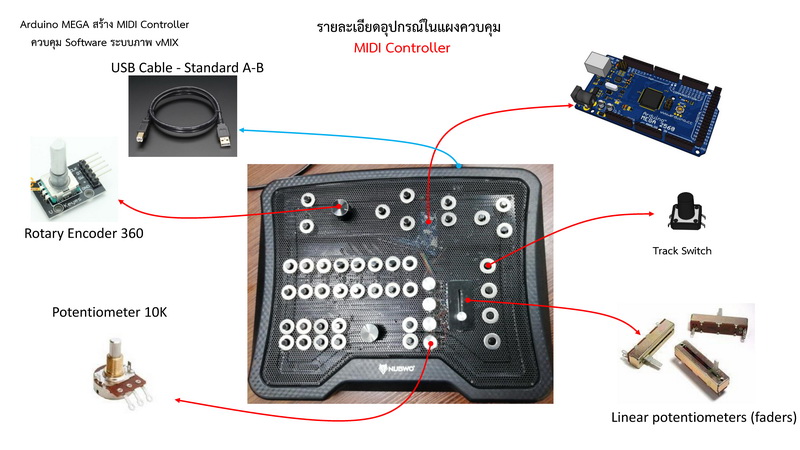
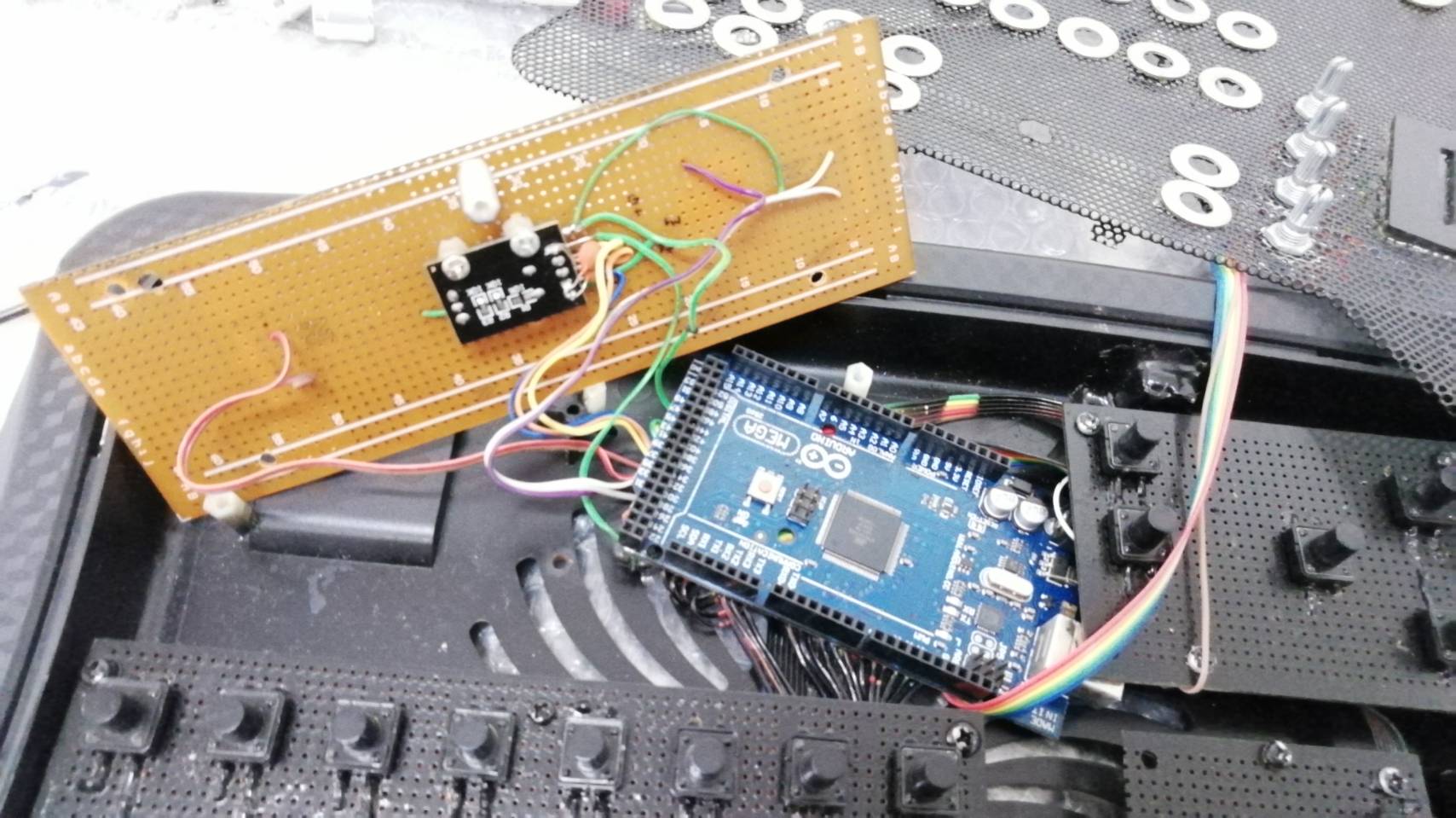
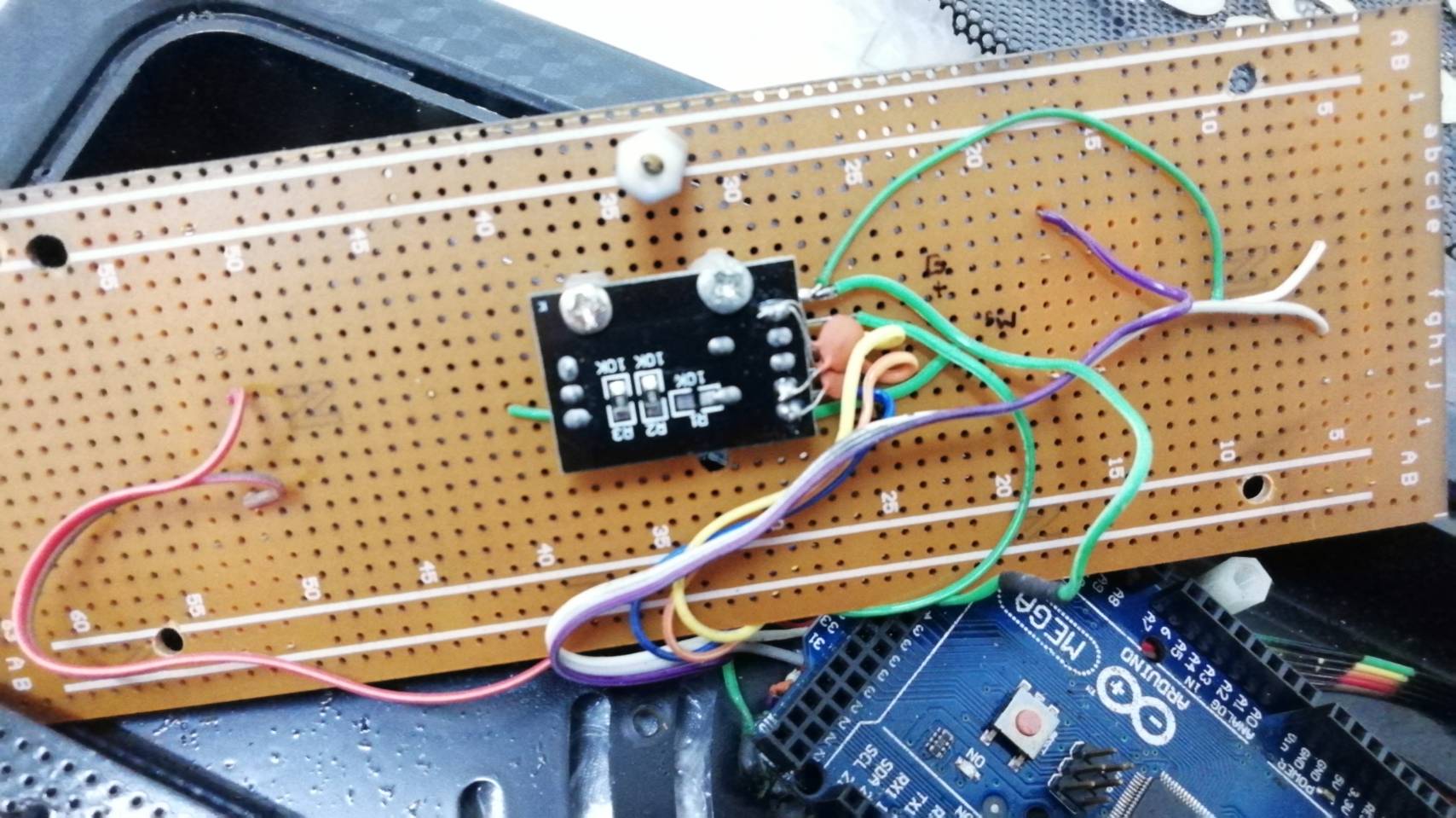
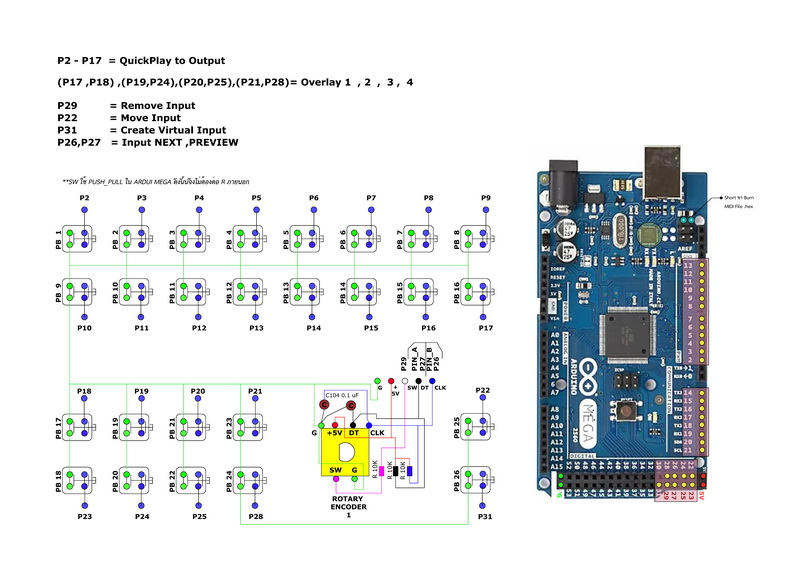
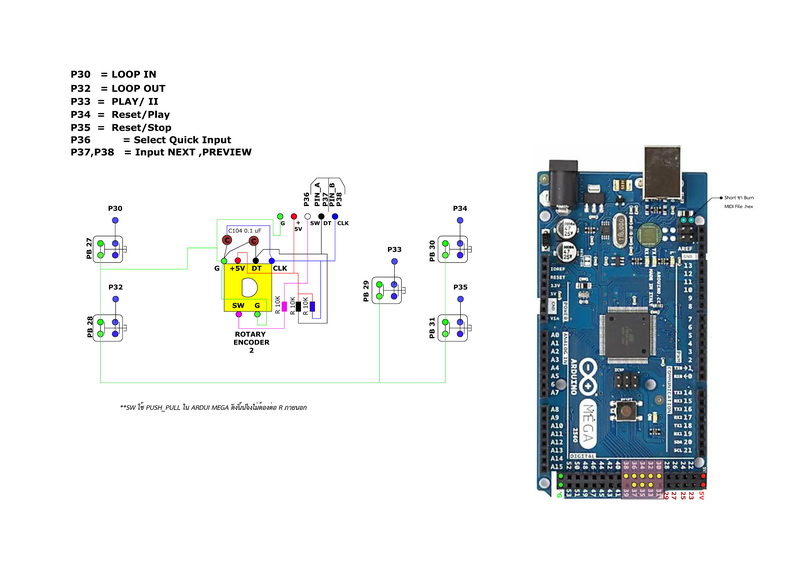
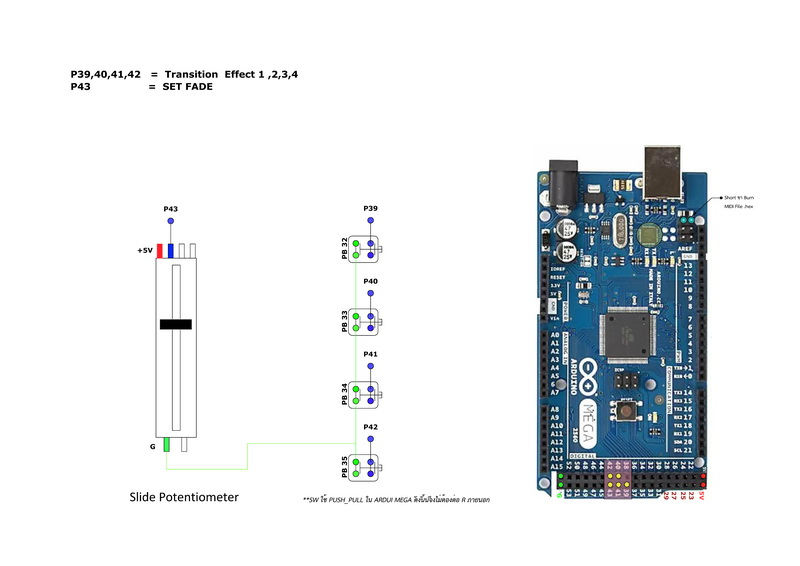
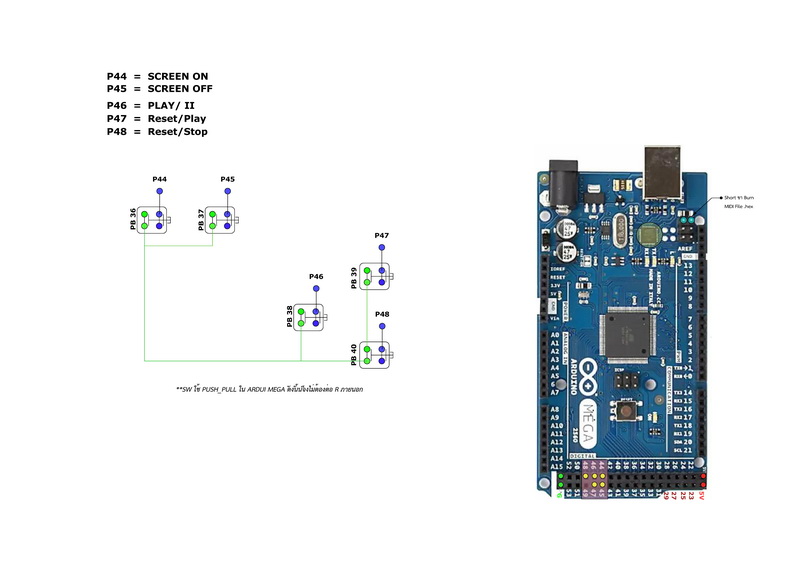
Diagram การต่อสาย
CODE
#define USE_ROTARY_ENCODER
#include <MIDI_Controller.h> // Include the library
#include <MIDI.h>
MIDI_CREATE_DEFAULT_INSTANCE(); //ตั้งค่า MIDI Libraly
//--- ปุ่มกด หลายตัว ---------------------------------------------------------------------------
int mem[] = { 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0 }; //เก็บค่าสถานะปุ่มกดแต่ละตำแหน่งเอาไว้
//---------------------------------------------------------------------------------------------------------------------
//-------------- Rotary Encoder ใช้ library MIDI_Controller.h ---------------------------------------------------------
//Rotary Encoder #1
const uint8_t Channel = 1; // MIDI channel 1
const uint8_t Controller = 0x14; // MIDI Control Change controller number
const int speedMultiply = 1; // No change in speed of the encoder (number of steps is multiplied by 1)
//Rotary Encoder #2
const uint8_t Channel2 = 2; // MIDI channel 1
const uint8_t Controller2 = 0x15; // MIDI Control Change controller number
const int speedMultiply2 = 1; // No change in speed of the encoder (number of steps is multiplied by 1)
// Create a new instance of the class 'RotaryEncoder', called 'enc', on pin 2 and 3, controller number 0x14, on channel1,
// no change in speed (speed is multiplied by 1), it's used as a jog wheel, and the sign mode is set to two's complement.
//TWOS_COMPLEMENT, BINARY_OFFSET or SIGN_MAGNITUDE
//RotaryEncoder encoder(26, 27, Controller, Channel, speedMultiply, JOG, TWOS_COMPLEMENT);
//RotaryEncoder encoder(26, 27, Controller, Channel, speedMultiply, JOG and NORMAL_ENCODER,TWOS_COMPLEMENT&SIGN_MAGNITUDE);
//หลังจากใส่คาปาซิเตอร์ 0.1 ไมโครฟารัดลงไปใน Rotary Encoder แล้วถ้าเลือกแบบนี้จังหวะการหมุนในการเลือกภาพเลื่อนไป 1 ช่องเท่ากับเลื่อน 2 ภาพ
//RotaryEncoder encoder(26, 27, Controller, Channel, speedMultiply, NORMAL_ENCODER, TWOS_COMPLEMENT);
//RotaryEncoder encoder(26, 27, Controller, Channel, speedMultiply, NORMAL_ENCODER, SIGN_MAGNITUDE)
//หลังจากใส่คาปาซิเตอร์ 0.1 ไมโครฟารัดลงไปใน Rotary Encoder แล้วถ้าเลือกแบบนี้จังหวะการหมุนในการเลือกภาพเลื่อนไป 2 ช่องเท่ากับเลื่อน 1 ภาพ
//Rotary Encoder #1
RotaryEncoder encoder(26, 27, Controller, Channel, speedMultiply, NORMAL_ENCODER, TWOS_COMPLEMENT&SIGN_MAGNITUDE);
//หลังจากใส่คาปาซิเตอร์ 0.1 ไมโครฟารัดลงไปใน Rotary Encoder แล้วถ้าเลือกแบบนี้จังหวะการหมุนในการเลือกภาพเลื่อนไป 2 ช่องเท่ากับเลื่อน 1 ภาพ
//ให้เข้าไปแก้จำนวนPluse ของ NORMAL_ENCODER จาก 4 Pluse ต่อ 1 คลิกเป็น 2 Pluse ต่อ 1 คลิก ของไฟล์ RotaryEncoder.h
//ที่อยู่ C:\Users\PUYIOT\Documents\Arduino\libraries\MIDI_controller-master\src\MIDI_Outputs
// จากนั้นให้เปิดปิดโค้ชใหม่เพื่อล้างค่าและรับค่าการเปลี่ยนแปลงของ Pluse ที่เราเปลี่ยนใหม่ด้วย
//Rotary Encoder #2
RotaryEncoder encoder2(37, 38, Controller2, Channel2, speedMultiply2, NORMAL_ENCODER, TWOS_COMPLEMENT&SIGN_MAGNITUDE);
//หลังจากใส่คาปาซิเตอร์ 0.1 ไมโครฟารัดลงไปใน Rotary Encoder แล้วถ้าเลือกแบบนี้จังหวะการหมุนในการเลือกภาพเลื่อนไป 2 ช่องเท่ากับเลื่อน 1 ภาพ
//ให้เข้าไปแก้จำนวนPluse ของ NORMAL_ENCODER จาก 4 Pluse ต่อ 1 คลิกเป็น 2 Pluse ต่อ 1 คลิก ของไฟล์ RotaryEncoder.h
//ที่อยู่ C:\Users\PUYIOT\Documents\Arduino\libraries\MIDI_controller-master\src\MIDI_Outputs
// จากนั้นให้เปิดปิดโค้ชใหม่เพื่อล้างค่าและรับค่าการเปลี่ยนแปลงของ Pluse ที่เราเปลี่ยนใหม่ด้วย
;
//--- ปุ่ม potentiometer1 slide ตัวที่ 1 ---------------------------------------------------------------------------
int val = 0;
int lastVal = 0;
Analog potentiometer1(A0, MIDI_CC::Channel_Volume, 1);
//---------------------------------------------------------------------------------------------------------------------
Analog potentiometer2(A1, MIDI_CC::Channel_Volume, 7);
Analog potentiometer3(A2, MIDI_CC::Channel_Volume, 8);
Analog potentiometer4(A3, MIDI_CC::Channel_Volume, 9);
Analog potentiometer5(A4, MIDI_CC::Channel_Volume, 10);
//************void setup ******************
//*******************************************
void setup()
{
Serial.begin(9600);
MIDI.begin(MIDI_CHANNEL_OMNI);//ให้ Libraly MIDI เริ่มต้นทำงาน
//กำหนดขาที่ใช้งานให้เป็นแบบ input pull up โดยใช้ R pull up ภายใน arduino
pinMode(2, INPUT_PULLUP ) ;
pinMode(3, INPUT_PULLUP ) ;
pinMode(4, INPUT_PULLUP ) ;
pinMode(5, INPUT_PULLUP ) ;
pinMode(6, INPUT_PULLUP ) ;
pinMode(7, INPUT_PULLUP ) ;
pinMode(8, INPUT_PULLUP ) ;
pinMode(9, INPUT_PULLUP ) ;
pinMode(10, INPUT_PULLUP ) ;
pinMode(11, INPUT_PULLUP ) ;
pinMode(12, INPUT_PULLUP ) ;
pinMode(13, INPUT_PULLUP ) ;
pinMode(14, INPUT_PULLUP ) ;
pinMode(15, INPUT_PULLUP ) ;
pinMode(16, INPUT_PULLUP ) ;
pinMode(17, INPUT_PULLUP ) ;
pinMode(18, INPUT_PULLUP ) ;
pinMode(19, INPUT_PULLUP ) ;
pinMode(20, INPUT_PULLUP ) ;
pinMode(21, INPUT_PULLUP ) ;
pinMode(22, INPUT_PULLUP ) ;
pinMode(23, INPUT_PULLUP ) ;
pinMode(24, INPUT_PULLUP ) ;
pinMode(25, INPUT_PULLUP ) ;
pinMode(28, INPUT_PULLUP ) ;
pinMode(31, INPUT_PULLUP ) ;
pinMode(29, INPUT_PULLUP ) ;//ปุ่มกด Encoder#1
pinMode(30, INPUT_PULLUP ) ;//LOOP IN
pinMode(32, INPUT_PULLUP ) ;//LOOP OUT
pinMode(33, INPUT_PULLUP ) ;//PLAY/ II
pinMode(34, INPUT_PULLUP ) ;//Reset/Play
pinMode(35, INPUT_PULLUP ) ;//Reset/Stop
pinMode(36, INPUT_PULLUP ) ;//ปุ่มกด Encoder#2
pinMode(39, INPUT_PULLUP ) ;//Transition Effect 1
pinMode(40, INPUT_PULLUP ) ;//Transition Effect 1
pinMode(41, INPUT_PULLUP ) ;//Transition Effect 1
pinMode(42, INPUT_PULLUP ) ;//Transition Effect 1
// pinMode(43, INPUT_PULLUP ) ;//SET FADE
pinMode(44, INPUT_PULLUP ) ;//SCREEN ON
pinMode(45, INPUT_PULLUP ) ;//SCREEN OFF
pinMode(46, INPUT_PULLUP ) ;//PLAY/ II
pinMode(47, INPUT_PULLUP ) ;//Reset/Play
pinMode(48, INPUT_PULLUP ) ;//Reset/Stop
}
//************ จบ void setup **************
//************void loop ********************************************************************************************
//********************************************************************************************************************
void loop() {
MIDI.read();
//------------------ สวิสทซ์ ปุ่มกด 16 ตัว แสดง ON OFF ใน โปรแกรม MIDI -------------------------------------------------
//อ่านปุ่มทุกปุ่มออกมา
int sensorVal[] = {
!digitalRead(2), !digitalRead(3),
!digitalRead(4), !digitalRead(5),
!digitalRead(6), !digitalRead(7),
!digitalRead(8), !digitalRead(9),
!digitalRead(10), !digitalRead(11),
!digitalRead(12), !digitalRead(13),
!digitalRead(14), !digitalRead(15),
!digitalRead(16), !digitalRead(17),
!digitalRead(18), !digitalRead(19),
!digitalRead(20), !digitalRead(21),
!digitalRead(22), !digitalRead(23),
!digitalRead(24), !digitalRead(25),
!digitalRead(28), !digitalRead(31),
!digitalRead(29),
!digitalRead(30), !digitalRead(32),
!digitalRead(33), !digitalRead(34),
!digitalRead(35), !digitalRead(36),
!digitalRead(39), !digitalRead(40),
!digitalRead(41), !digitalRead(42),
!digitalRead(44), !digitalRead(45),
!digitalRead(46), !digitalRead(47),
!digitalRead(48)
};
//ถ้าสถานะปุ่มมีการเปลี่ยนแปลง
for (int j = 0; j < 42; j++) {
if (sensorVal[j] != mem[j]) {
mem[j] = sensorVal[j];
// จะมีการส่ง MIDI Even ออกไป
if (mem[j]) {
MIDI.sendNoteOn(j + 51, 64, 1);
} else {
MIDI.sendNoteOff(j + 1, 64, 1);
}
}
MIDI_Controller.refresh(); //ฟังก์ชันของ Rotary Encoder
}
//---------------------------------------------------------------------------------------------------------------------
}
//************************************************ จบ void loop ********************************************************
//************************************************************************************************************************
ผมอธิบายไม่เก่งนะครับ แต่อยากจะนำเสนอให้ทุกท่านที่ สนใจ ได้ดูรายละเอียดกัน