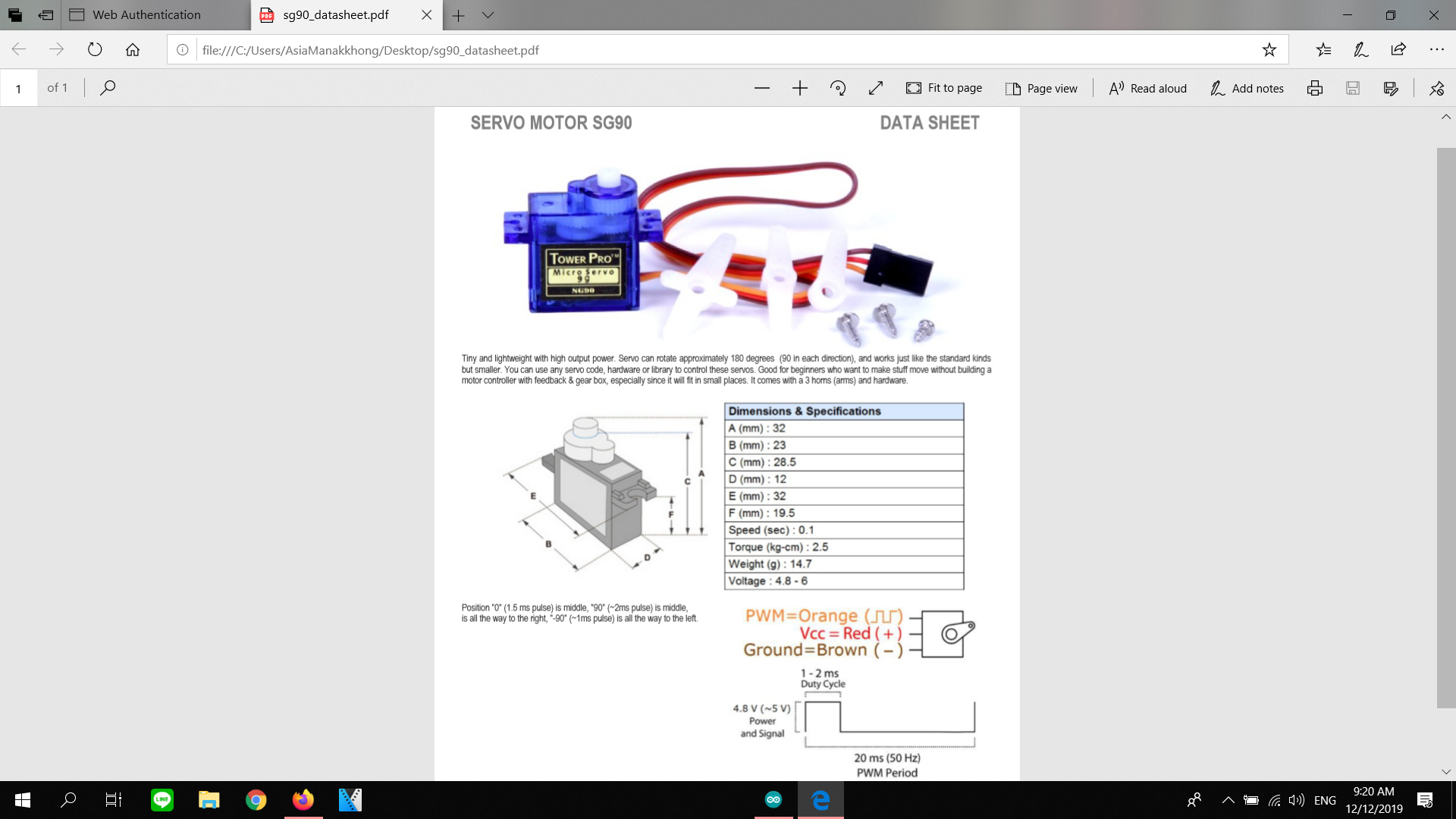
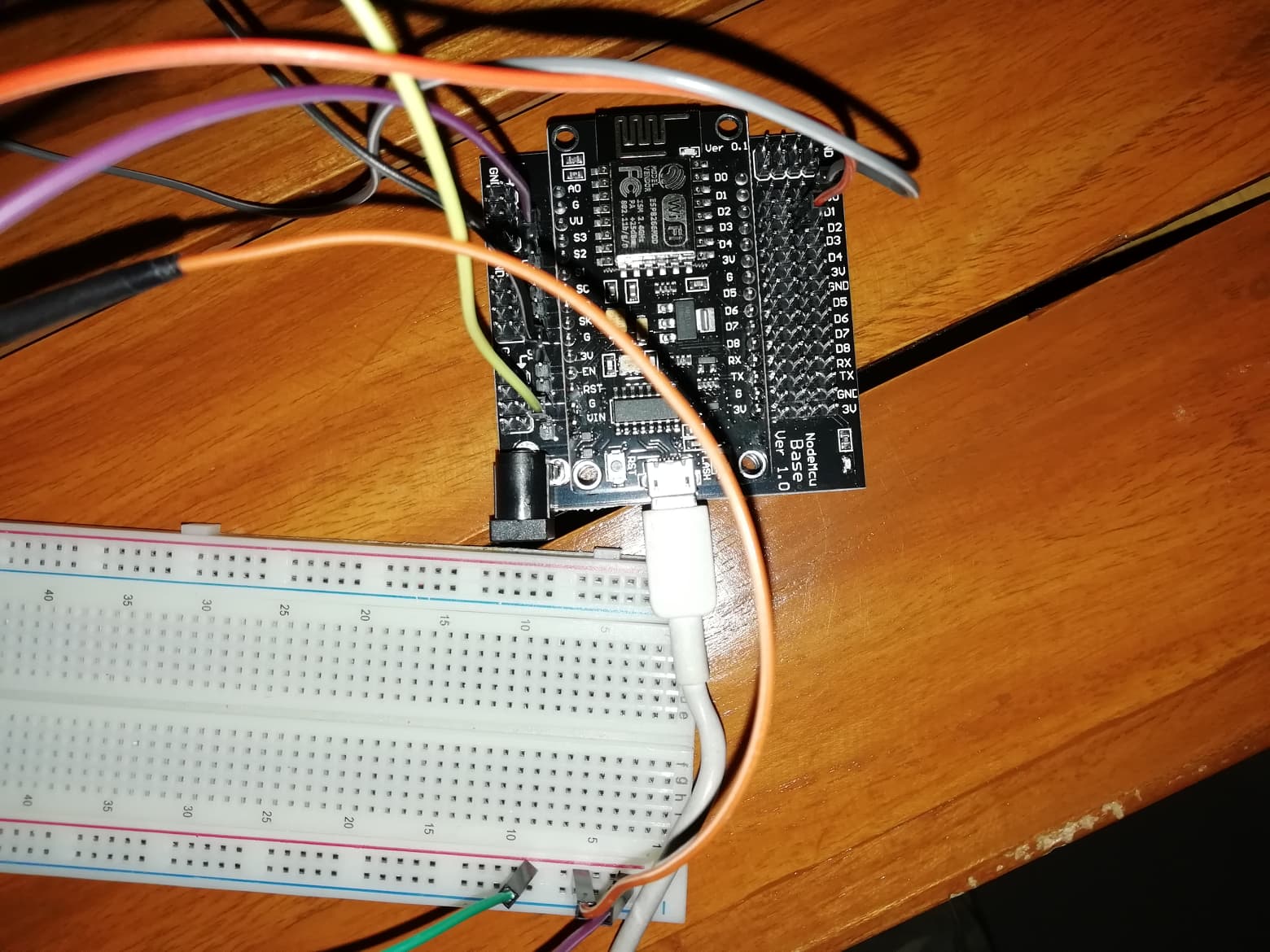
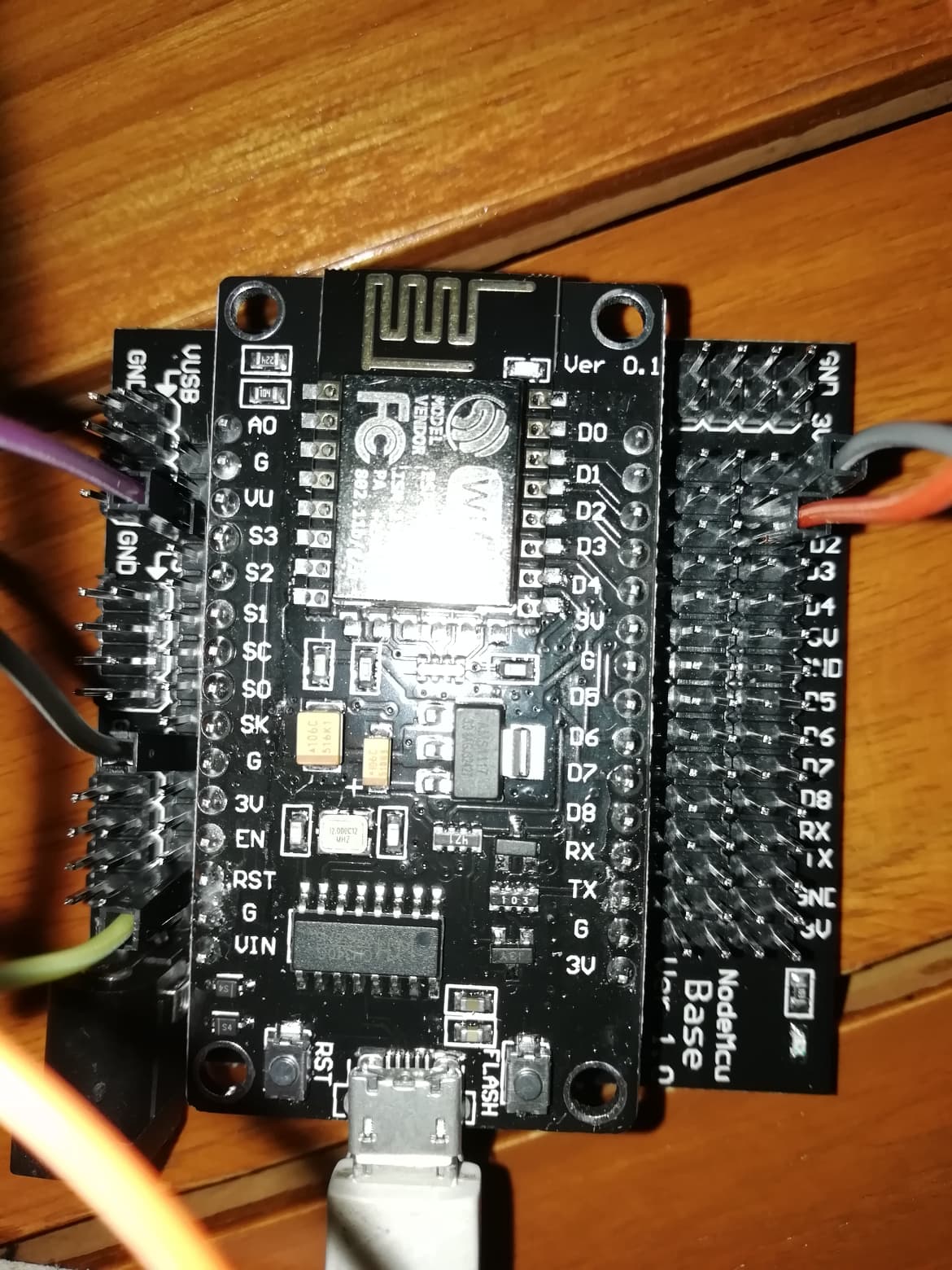
คือผมต่อใช้ Micro Servo Motor 2 ตัวด้วย NodeMCU ESP8266 แต่ตอนสั่งงานมันดีเลย์ค่อนข้างนานกว่าจะทำงาน เลยสงสัยว่าต้องมีตัววงจร Drive เสริมรึป่าวครับ รบกวนด้วย
ขอดูสเปคมอเตอร์ที่ใช้ โปรแกรม และวิธีการต่อครับ
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <ESP8266HTTPClient.h>
#include <BlynkSimpleEsp8266.h>
#include <Servo.h>
#define trigPin1 14
#define echoPin1 12
#define trigPin2 13
#define echoPin2 15
int maximumRange = 16;
int minimumRange = 4;
char networkDriver = ‘b’; // ‘n’ = normal ‘b’ = blynk
///// เชื่อมต่อ Blynk server
char ssid[] = “Maruay3R7”;
char password[] = “maruay3R7”; //0620382683
// Blynk
char auth[] = “rVciMkltCVwVfk1euPcMEST56MQ-ihWF”;
// LINE
const String lineHost = “notify-api.line.me”;
const String notifyApi = “/api/notify”;
const String token = “MmZ6vruJKISH9CscEX25t1Z1SS6Y7tJoO0hOtFQY3t8”;
const int httpsPort = 443;
const char fingerprint[] PROGMEM = “BF 16 AE 79 D2 AB 71 44 BE D8 E7 55 A2 C7 0B 39 68 DB B5 D2”;
// Constant of timer
const int httpTimeout = 5000;
const unsigned long DELAY_1_S = 1000UL;
uint32_t DELAY_1_MINUTE = DELAY_1_S * 60UL;
unsigned long DELAY_1_HOUR = 3600 * DELAY_1_MINUTE;
Servo servo1;
// ตั้งเวลา 1
BLYNK_WRITE(V1)
{
Serial.print("Got a value: ");
Serial.println(param.asInt());
if(param.asInt() == 0)
{
digitalWrite(2, HIGH);
servo1.write(0);
delay (1000);
}
if(param.asInt() == 1)
{
digitalWrite(2, LOW);
servo1.write(90);
delay (1000);
}
}
Servo servo2;
// ตั้งเวลา 2
BLYNK_WRITE(V2)
{
Serial.print("Got a value: ");
Serial.println(param.asInt());
if(param.asInt() == 0)
{
digitalWrite(2, HIGH);
servo2.write(0);
delay (1000);
}
if(param.asInt() == 1)
{
digitalWrite(2, LOW);
servo2.write(90);
delay (1000);
}
}
// Ultrasonic แสดง LCD ใน Blynk
WidgetLCD lcd(V5);
void setup()
{
//ประกาศ 0 องศาตอนเริ่ม
servo1.write(0);
servo2.write(0);
delay(10);
//ประกาศขา Servo
servo1.attach(5);
servo2.attach(4);
Serial.begin(115200);
pinMode(2, OUTPUT);
pinMode(trigPin1, OUTPUT);
pinMode(echoPin1, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
connectNetwork(networkDriver);
}
unsigned long timeNowMin = 0;
unsigned long timeNowSec = 0;
void loop()
{
//ลูปการแสดงค่า LCD ใน Blynk Sensor 1
long duration1 ;
float distance1 ;
digitalWrite(trigPin1, LOW);
delayMicroseconds(2);
digitalWrite(trigPin1, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin1, LOW);
duration1 = pulseIn(echoPin1, HIGH);
distance1 = duration1 * 0.034 / 2;
if (distance1 >= maximumRange){
Serial.print(“100%”);
lcd.print(10, 0, " 100%");
}
else if ( distance1 < 16 && distance1 >= 15.88 ){
Serial.print("Sensor1 100% “);
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, " 100%”);
delay (2000) ;
}
else if ( distance1 < 15.76 && distance1 >= 15.64 ){
Serial.print("Sensor1 98% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “98_%”);
delay (2000) ;
}
else if ( distance1 < 15.64 && distance1 >= 15.52 ){
Serial.print("Sensor1 97% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “97_%”);
delay (2000) ;
}
else if ( distance1 < 15.52 && distance1 >= 15.40 ){
Serial.print("Sensor1 96% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “96_%”);
delay (2000) ;
}
else if ( distance1 < 15.40 && distance1 >= 15.28 ){
Serial.print("Sensor1 95% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “95_%”);
delay (2000) ;
}
else if ( distance1 < 15.28 && distance1 >= 15.16 ){
Serial.print("Sensor1 94% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “94_%”);
delay (2000) ;
}
else if ( distance1 < 15.16 && distance1 >= 15.04 ){
Serial.print("Sensor1 93% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “93_%”);
}
else if ( distance1 < 15.04 && distance1 >= 14.92 ){
Serial.print("Sensor1 92% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “92_%”);
delay (2000) ;
}
else if ( distance1 < 14.91 && distance1 >= 14.8 ){
Serial.print("Sensor1 91% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “91_%”);
}
else if ( distance1 < 14.8 && distance1 >= 14.68 ){
Serial.print("Sensor1 90% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “90_%”);
delay (2000) ;
}
else if ( distance1 < 14.68 && distance1 >= 14.56 ){
Serial.print("Sensor1 89% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “89_%”);
delay (2000) ;
}
else if ( distance1 < 14.56 && distance1 >= 14.44 ){
Serial.print("Sensor1 88% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “88_%”);
delay (2000) ;
}
else if ( distance1 < 14.44 && distance1 >= 14.32 ){
Serial.print("Sensor1 87% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “87_%”);
delay (2000) ;
}
else if ( distance1 < 14.32 && distance1 >= 14.20 ){
Serial.print("Sensor1 86% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “86_%”);
delay (2000) ;
}
else if ( distance1 < 14.20 && distance1 >= 14.08 ){
Serial.print("Sensor1 85% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “85_%”);
delay (2000) ;
}
else if ( distance1 < 14.08 && distance1 >= 13.96 ){
Serial.print("Sensor1 84% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “84_%”);
delay (2000) ;
}
else if ( distance1 < 13.96 && distance1 >= 13.84 ){
Serial.print("Sensor1 83% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “83_%”);
delay (2000) ;
}
else if ( distance1 < 13.84 && distance1 >= 13.72 ){
Serial.print("Sensor1 82% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “82_%”);
delay (2000) ;
}
else if ( distance1 < 13.72 && distance1 >= 13.60 ){
Serial.print("Sensor1 81% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “81_%”);
delay (2000) ;
}
else if ( distance1 < 13.60 && distance1 >= 13.48 ){
Serial.print("Sensor1 80% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “80_%”);
delay (2000) ;
}
else if ( distance1 < 13.48 && distance1 >= 13.36 ){
Serial.print("Sensor1 79% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “79_%”);
delay (2000) ;
}
else if ( distance1 < 13.36 && distance1 >= 13.24 ){
Serial.print("Sensor1 78% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “78_%”);
delay (2000) ;
}
else if ( distance1 < 13.24 && distance1 >= 13.12 ){
Serial.print("Sensor1 77% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “77_%”);
delay (2000) ;
}
else if ( distance1 < 13.12 && distance1 >= 13.00 ){
Serial.print("Sensor1 76% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “76_%”);
delay (2000) ;
}
else if ( distance1 < 13.00 && distance1 >= 12.88 ){
Serial.print("Sensor1 75% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “75_%”);
delay (2000) ;
}
else if ( distance1 < 12.88 && distance1 >= 12.76 ){
Serial.print("Sensor1 74% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “74_%”);
delay (2000) ;
}
else if ( distance1 < 12.76 && distance1 >= 12.64 ){
Serial.print("Sensor1 73% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “73_%”);
delay (2000) ;
}
else if ( distance1 < 12.64 && distance1 >= 12.52 ){
Serial.print("Sensor1 72% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “72_%”);
delay (2000) ;
}
else if ( distance1 < 12.52 && distance1 >= 12.40 ){
Serial.print("Sensor1 71% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “71_%”);
delay (2000) ;
}
else if ( distance1 < 12.40 && distance1 >= 12.28 ){
Serial.print("Sensor1 70% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “70_%”);
delay (2000) ;
}
else if ( distance1 < 12.28 && distance1 >= 12.16 ){
Serial.print("Sensor1 69% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “69_%”);
delay (2000) ;
}
else if ( distance1 < 12.16 && distance1 >= 12.04 ){
Serial.print("Sensor1 68% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “68_%”);
delay (2000) ;
}
else if ( distance1 < 12.04 && distance1 >= 11.92 ){
Serial.print("Sensor1 67% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “67_%”);
delay (2000) ;
}
else if ( distance1 < 11.92 && distance1 >= 11.80 ){
Serial.print("Sensor1 66% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “66_%”);
delay (2000) ;
}
else if ( distance1 < 11.80 && distance1 >= 11.68 ){
Serial.print("Sensor1 65% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “65_%”);
delay (2000) ;
}
else if ( distance1 < 11.68 && distance1 >= 11.56 ){
Serial.print("Sensor1 64% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “64_%”);
delay (2000) ;
}
else if ( distance1 < 11.56 && distance1 >= 11.44 ){
Serial.print("Sensor1 63% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “63_%”);
delay (2000) ;
}
else if ( distance1 < 11.44 && distance1 >= 11.32 ){
Serial.print("Sensor1 62% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “62_%”);
delay (2000) ;
}
else if ( distance1 < 11.32 && distance1 >= 11.20 ){
Serial.print("Sensor1 61% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “61_%”);
delay (2000) ;
}
else if ( distance1 < 11.20 && distance1 >= 11.08 ){
Serial.print("Sensor1 60% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “60_%”);
delay (2000) ;
}
else if ( distance1 < 11.08 && distance1 >= 10.96 ){
Serial.print("Sensor1 59% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “59_%”);
delay (2000) ;
}
else if ( distance1 < 10.96 && distance1 >= 10.84 ){
Serial.print("Sensor1 58% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “58_%”);
delay (2000) ;
}
else if ( distance1 < 10.84 && distance1 >= 10.72 ){
Serial.print("Sensor1 57% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “57_%”);
delay (2000) ;
}
else if ( distance1 < 10.72 && distance1 >= 10.60 ){
Serial.print("Sensor1 56% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “56_%”);
delay (2000) ;
}
else if ( distance1 < 10.60 && distance1 >= 10.48 ){
Serial.print("Sensor1 55% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “55_%”);
delay (2000) ;
}
else if ( distance1 < 10.48 && distance1 >= 10.36 ){
Serial.print("Sensor1 54% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “54_%”);
delay (2000) ;
}
else if ( distance1 < 10.36 && distance1 >= 10.24 ){
Serial.print("Sensor1 53% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “53_%”);
delay (2000) ;
}
else if ( distance1 < 10.24 && distance1 >= 10.12 ){
Serial.print("Sensor1 52% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “52_%”);
delay (2000) ;
}
else if ( distance1 < 10.12 && distance1 >= 10.00 ){
Serial.print("Sensor1 51% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “51_%”);
delay (2000) ;
}
else if ( distance1 < 10.00 && distance1 >= 9.88 ){
Serial.print("Sensor1 50% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “50_%”);
delay (2000) ;
}
else if ( distance1 < 9.88 && distance1 >= 9.76 ){
Serial.print("Sensor1 49% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “49_%”);
delay (2000) ;
}
else if ( distance1 < 9.76 && distance1 >= 9.64 ){
Serial.print("Sensor1 48% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “48_%”);
delay (2000) ;
}
else if ( distance1 < 9.64 && distance1 >= 9.52 ){
Serial.print("Sensor1 47% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “47_%”);
delay (2000) ;
}
else if ( distance1 < 9.52 && distance1 >= 9.40 ){
Serial.print("Sensor1 46% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “46_%”);
delay (2000) ;
}
else if ( distance1 < 9.40 && distance1 >= 9.28 ){
Serial.print("Sensor1 45% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “45_%”);
delay (2000) ;
}
else if ( distance1 < 9.28 && distance1 >= 9.16 ){
Serial.print("Sensor1 44% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “44_%”);
delay (2000) ;
}
else if ( distance1 < 9.16 && distance1 >= 9.04 ){
Serial.print("Sensor1 43% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “43_%”);
delay (2000) ;
}
else if ( distance1 < 9.04 && distance1 >= 8.92 ){
Serial.print("Sensor1 42% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “42_%”);
delay (2000) ;
}
else if ( distance1 < 8.92 && distance1 >= 8.80 ){
Serial.print("Sensor1 41% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “41_%”);
delay (2000) ;
}
else if ( distance1 < 8.80 && distance1 >= 8.68 ){
Serial.print("Sensor1 40% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “40_%”);
delay (2000) ;
}
else if ( distance1 < 8.68 && distance1 >= 8.56 ){
Serial.print("Sensor1 39% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “39_%”);
delay (2000) ;
}
else if ( distance1 < 8.56 && distance1 >= 8.44 ){
Serial.print("Sensor1 38% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “38_%”);
delay (2000) ;
}
else if ( distance1 < 8.44 && distance1 >= 8.32 ){
Serial.print("Sensor1 37% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “37_%”);
delay (2000) ;
}
else if ( distance1 < 8.32 && distance1 >= 8.20 ){
Serial.print("Sensor1 36% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “36_%”);
delay (2000) ;
}
else if ( distance1 < 8.20 && distance1 >= 8.08 ){
Serial.print("Sensor1 35% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “35_%”);
delay (2000) ;
}
else if ( distance1 < 8.08 && distance1 >= 7.96 ){
Serial.print("Sensor1 34% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “34_%”);
delay (2000) ;
}
else if ( distance1 < 7.96 && distance1 >= 7.84 ){
Serial.print("Sensor1 33% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “33_%”);
delay (2000) ;
}
else if ( distance1 < 7.84 && distance1 >= 7.72 ){
Serial.print("Sensor1 32% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “32_%”);
delay (2000) ;
}
else if ( distance1 < 7.72 && distance1 >= 7.60 ){
Serial.print("Sensor1 31% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “31_%”);
delay (2000) ;
}
else if ( distance1 < 7.60 && distance1 >= 7.48 ){
Serial.print("Sensor1 30% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “30_%”);
delay (2000) ;
}
else if ( distance1 < 7.48 && distance1 >= 7.36 ){
Serial.print("Sensor1 29% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “29_%”);
delay (2000) ;
}
else if ( distance1 < 7.36 && distance1 >= 7.24 ){
Serial.print("Sensor1 28% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “28_%”);
delay (2000) ;
}
else if ( distance1 < 7.24 && distance1 >= 7.12 ){
Serial.print("Sensor1 27% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “27_%”);
delay (2000) ;
}
else if ( distance1 < 7.12 && distance1 >= 7.00 ){
Serial.print("Sensor1 26% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “26_%”);
delay (2000) ;
}
else if ( distance1 < 7.00 && distance1 >= 6.88 ){
Serial.print("Sensor1 25% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “25_%”);
delay (2000) ;
}
else if ( distance1 < 6.88 && distance1 >= 6.76 ){
Serial.print("Sensor1 24% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “24_%”);
delay (2000) ;
}
else if ( distance1 < 6.76 && distance1 >= 6.64 ){
Serial.print("Sensor1 23% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “23_%”);
delay (2000) ;
}
else if ( distance1 < 6.64 && distance1 >= 6.52 ){
Serial.print("Sensor1 22% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “22_%”);
delay (2000) ;
}
else if ( distance1 < 6.52 && distance1 >= 6.40 ){
Serial.print("Sensor1 21% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “21_%”);
delay (2000) ;
}
else if ( distance1 < 6.40 && distance1 >= 6.28 ){
Serial.print("Sensor1 20% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “20_%”);
LineNotify(“Food 20 %25”, true );
delay (2000) ;
}
else if ( distance1 < 6.28 && distance1 >= 6.16 ){
Serial.print("Sensor1 19% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “19_%”);
delay (2000) ;
}
else if ( distance1 < 6.16 && distance1 >= 6.04 ){
Serial.print("Sensor1 18% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “18_%”);
delay (2000) ;
}
else if ( distance1 < 6.04 && distance1 >= 5.92 ){
Serial.print("Sensor1 17% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “17_%”);
delay (2000) ;
}
else if ( distance1 < 5.92 && distance1 >= 5.80 ){
Serial.print("Sensor1 16% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “16_%”);
delay (2000) ;
}
else if ( distance1 < 5.80 && distance1 >= 5.68 ){
Serial.print("Sensor1 15% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “15_%”);
delay (2000) ;
}
else if ( distance1 < 5.68 && distance1 >= 5.56 ){
Serial.print("Sensor1 14% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “14_%”);
delay (2000) ;
}
else if ( distance1 < 5.56 && distance1 >= 5.44 ){
Serial.print("Sensor1 13% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “13_%”);
delay (2000) ;
}
else if ( distance1 < 5.44 && distance1 >= 5.32 ){
Serial.print("Sensor1 12% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “12_%”);
delay (2000) ;
}
else if ( distance1 < 5.32 && distance1 >= 5.20 ){
Serial.print("Sensor1 11% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “11_%”);
delay (2000) ;
}
else if ( distance1 < 5.20 && distance1 >= 5.08 ){
Serial.print("Sensor1 10% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “10_%”);
LineNotify(“trueFood 10 %25”, true );
delay (2000) ;
}
else if ( distance1 < 5.08 && distance1 >= 4.96 ){
Serial.print("Sensor1 9% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “9__%”);
delay (2000) ;
}
else if ( distance1 < 4.96 && distance1 >= 4.84 ){
Serial.print("Sensor1 8% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “8__%”);
delay (2000) ;
}
else if ( distance1 < 4.84 && distance1 >= 4.72 ){
Serial.print("Sensor1 7% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “7__%”);
delay (2000) ;
}
else if ( distance1 < 4.72 && distance1 >= 4.60 ){
Serial.print("Sensor1 6% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “6__%”);
delay (2000) ;
}
else if ( distance1 < 4.60 && distance1 >= 4.48 ){
Serial.print("Sensor1 5% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “5__%”);
delay (2000) ;
}
else if ( distance1 < 4.48 && distance1 >= 4.36 ){
Serial.print("Sensor1 4% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “4__%”);
delay (2000) ;
}
else if ( distance1 < 4.36 && distance1 >= 4.24 ){
Serial.print("Sensor1 3% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “3__%”);
delay (2000) ;
}
else if ( distance1 < 4.24 && distance1 >= 4.12 ){
Serial.print("Sensor1 2% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “2__%”);
delay (2000) ;
}
else if ( distance1 < 4.12 && distance1 >= 4.00 ){
Serial.print("Sensor1 1% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “1__%”);
delay (2000) ;
}
else if ( distance1 < 4.00 && distance1 >= 0 ){
Serial.print("Sensor1 0% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 0, “0__%”);
LineNotify(“trueFood 0 %25”, true );
delay (2000) ;
}
lcd.print(0, 1, “Food Level”);
Blynk.run();
}

ไฮไลท์แล้วครับ
โค้ดที่ส่งไปนิยังไม่หมดนะครับยังมีในส่วนของแจ้งเตือนไลน์อีก เกี่ยวไหมครับ
ต้องเอาเต็มๆ นะครับเกี่ยวหมด
#define BLYNK_PRINT Serial
#include <ESP8266WiFi.h>
#include <ESP8266HTTPClient.h>
#include <BlynkSimpleEsp8266.h>
#include <Servo.h>
#define trigPin1 14
#define echoPin1 12
#define trigPin2 13
#define echoPin2 15
int maximumRange = 16;
int minimumRange = 4;
char networkDriver = 'b'; // 'n' = normal 'b' = blynk
///// เชื่อมต่อ Blynk server
char ssid[] = "Maruay3R7";
char password[] = "maruay3R7"; //0620382683
// Blynk
char auth[] = "rVciMkltCVwVfk1euPcMEST56MQ-ihWF";
// LINE
const String lineHost = "notify-api.line.me";
const String notifyApi = "/api/notify";
const String token = "MmZ6vruJKISH9CscEX25t1Z1SS6Y7tJoO0hOtFQY3t8";
const int httpsPort = 443;
const char fingerprint[] PROGMEM = "BF 16 AE 79 D2 AB 71 44 BE D8 E7 55 A2 C7 0B 39 68 DB B5 D2";
// Constant of timer
const int httpTimeout = 100;
const unsigned long DELAY_1_S = 1000UL;
uint32_t DELAY_1_MINUTE = DELAY_1_S * 60UL;
unsigned long DELAY_1_HOUR = 3600 * DELAY_1_MINUTE;
Servo servo1;
// ตั้งเวลา 1
BLYNK_WRITE(V1)
{
Serial.print("Got a value: ");
Serial.println(param.asInt());
if(param.asInt() == 0)
{
digitalWrite(2, HIGH);
servo1.write(0);
delay (1000);
}
if(param.asInt() == 1)
{
digitalWrite(2, LOW);
servo1.write(90);
delay (1000);
}
}
Servo servo2;
// ตั้งเวลา 2
BLYNK_WRITE(V2)
{
Serial.print("Got a value: ");
Serial.println(param.asInt());
if(param.asInt() == 0)
{
digitalWrite(2, HIGH);
servo2.write(0);
delay (1000);
}
if(param.asInt() == 1)
{
digitalWrite(2, LOW);
servo2.write(90);
delay (1000);
}
}
// Ultrasonic แสดง LCD ใน Blynk
WidgetLCD lcd(V5);
void setup()
{
//ประกาศ 0 องศาตอนเริ่ม
servo1.write(0);
servo2.write(0);
delay(10);
//ประกาศขา Servo
servo1.attach(5);
servo2.attach(4);
Serial.begin(115200);
pinMode(2, OUTPUT);
pinMode(trigPin1, OUTPUT);
pinMode(echoPin1, INPUT);
pinMode(trigPin2, OUTPUT);
pinMode(echoPin2, INPUT);
connectNetwork(networkDriver);
}
unsigned long timeNowMin = 0;
unsigned long timeNowSec = 0;
void loop()
{
//ลูปการแสดงค่า LCD ใน Blynk Sensor 1
long duration1 ;
float distance1 ;
digitalWrite(trigPin1, LOW);
delayMicroseconds(2);
digitalWrite(trigPin1, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin1, LOW);
duration1 = pulseIn(echoPin1, HIGH);
distance1 = duration1 * 0.034 / 2;
if (distance1 >= maximumRange){
Serial.print("100%");
lcd.print(10, 0, " 100%");
}
else if ( distance1 < 16 && distance1 >= 15.88 ){
Serial.print("Sensor1 100% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, " 100%");
delay (2000) ;
}
else if ( distance1 < 15.76 && distance1 >= 15.64 ){
Serial.print("Sensor1 98% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "98_%");
delay (2000) ;
}
else if ( distance1 < 15.64 && distance1 >= 15.52 ){
Serial.print("Sensor1 97% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "97_%");
delay (2000) ;
}
else if ( distance1 < 15.52 && distance1 >= 15.40 ){
Serial.print("Sensor1 96% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "96_%");
delay (2000) ;
}
else if ( distance1 < 15.40 && distance1 >= 15.28 ){
Serial.print("Sensor1 95% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "95_%");
delay (2000) ;
}
else if ( distance1 < 15.28 && distance1 >= 15.16 ){
Serial.print("Sensor1 94% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "94_%");
delay (2000) ;
}
else if ( distance1 < 15.16 && distance1 >= 15.04 ){
Serial.print("Sensor1 93% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "93_%");
}
else if ( distance1 < 15.04 && distance1 >= 14.92 ){
Serial.print("Sensor1 92% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "92_%");
delay (2000) ;
}
else if ( distance1 < 14.91 && distance1 >= 14.8 ){
Serial.print("Sensor1 91% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "91_%");
}
else if ( distance1 < 14.8 && distance1 >= 14.68 ){
Serial.print("Sensor1 90% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "90_%");
delay (2000) ;
}
else if ( distance1 < 14.68 && distance1 >= 14.56 ){
Serial.print("Sensor1 89% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "89_%");
delay (2000) ;
}
else if ( distance1 < 14.56 && distance1 >= 14.44 ){
Serial.print("Sensor1 88% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "88_%");
delay (2000) ;
}
else if ( distance1 < 14.44 && distance1 >= 14.32 ){
Serial.print("Sensor1 87% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "87_%");
delay (2000) ;
}
else if ( distance1 < 14.32 && distance1 >= 14.20 ){
Serial.print("Sensor1 86% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "86_%");
delay (2000) ;
}
else if ( distance1 < 14.20 && distance1 >= 14.08 ){
Serial.print("Sensor1 85% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "85_%");
delay (2000) ;
}
else if ( distance1 < 14.08 && distance1 >= 13.96 ){
Serial.print("Sensor1 84% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "84_%");
delay (2000) ;
}
else if ( distance1 < 13.96 && distance1 >= 13.84 ){
Serial.print("Sensor1 83% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "83_%");
delay (2000) ;
}
else if ( distance1 < 13.84 && distance1 >= 13.72 ){
Serial.print("Sensor1 82% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "82_%");
delay (2000) ;
}
else if ( distance1 < 13.72 && distance1 >= 13.60 ){
Serial.print("Sensor1 81% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "81_%");
delay (2000) ;
}
else if ( distance1 < 13.60 && distance1 >= 13.48 ){
Serial.print("Sensor1 80% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "80_%");
delay (2000) ;
}
else if ( distance1 < 13.48 && distance1 >= 13.36 ){
Serial.print("Sensor1 79% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "79_%");
delay (2000) ;
}
else if ( distance1 < 13.36 && distance1 >= 13.24 ){
Serial.print("Sensor1 78% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "78_%");
delay (2000) ;
}
else if ( distance1 < 13.24 && distance1 >= 13.12 ){
Serial.print("Sensor1 77% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "77_%");
delay (2000) ;
}
else if ( distance1 < 13.12 && distance1 >= 13.00 ){
Serial.print("Sensor1 76% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "76_%");
delay (2000) ;
}
else if ( distance1 < 13.00 && distance1 >= 12.88 ){
Serial.print("Sensor1 75% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "75_%");
delay (2000) ;
}
else if ( distance1 < 12.88 && distance1 >= 12.76 ){
Serial.print("Sensor1 74% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "74_%");
delay (2000) ;
}
else if ( distance1 < 12.76 && distance1 >= 12.64 ){
Serial.print("Sensor1 73% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "73_%");
delay (2000) ;
}
else if ( distance1 < 12.64 && distance1 >= 12.52 ){
Serial.print("Sensor1 72% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "72_%");
delay (2000) ;
}
else if ( distance1 < 12.52 && distance1 >= 12.40 ){
Serial.print("Sensor1 71% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "71_%");
delay (2000) ;
}
else if ( distance1 < 12.40 && distance1 >= 12.28 ){
Serial.print("Sensor1 70% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "70_%");
delay (2000) ;
}
else if ( distance1 < 12.28 && distance1 >= 12.16 ){
Serial.print("Sensor1 69% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "69_%");
delay (2000) ;
}
else if ( distance1 < 12.16 && distance1 >= 12.04 ){
Serial.print("Sensor1 68% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "68_%");
delay (2000) ;
}
else if ( distance1 < 12.04 && distance1 >= 11.92 ){
Serial.print("Sensor1 67% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "67_%");
delay (2000) ;
}
else if ( distance1 < 11.92 && distance1 >= 11.80 ){
Serial.print("Sensor1 66% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "66_%");
delay (2000) ;
}
else if ( distance1 < 11.80 && distance1 >= 11.68 ){
Serial.print("Sensor1 65% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "65_%");
delay (2000) ;
}
else if ( distance1 < 11.68 && distance1 >= 11.56 ){
Serial.print("Sensor1 64% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 1, "64_%");
delay (2000) ;
}
else if ( distance1 < 11.56 && distance1 >= 11.44 ){
Serial.print("Sensor1 63% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "63_%");
delay (2000) ;
}
else if ( distance1 < 11.44 && distance1 >= 11.32 ){
Serial.print("Sensor1 62% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "62_%");
delay (2000) ;
}
else if ( distance1 < 11.32 && distance1 >= 11.20 ){
Serial.print("Sensor1 61% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "61_%");
delay (2000) ;
}
else if ( distance1 < 11.20 && distance1 >= 11.08 ){
Serial.print("Sensor1 60% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "60_%");
delay (2000) ;
}
else if ( distance1 < 11.08 && distance1 >= 10.96 ){
Serial.print("Sensor1 59% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "59_%");
delay (2000) ;
}
else if ( distance1 < 10.96 && distance1 >= 10.84 ){
Serial.print("Sensor1 58% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "58_%");
delay (2000) ;
}
else if ( distance1 < 10.84 && distance1 >= 10.72 ){
Serial.print("Sensor1 57% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "57_%");
delay (2000) ;
}
else if ( distance1 < 10.72 && distance1 >= 10.60 ){
Serial.print("Sensor1 56% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "56_%");
delay (2000) ;
}
else if ( distance1 < 10.60 && distance1 >= 10.48 ){
Serial.print("Sensor1 55% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "55_%");
delay (2000) ;
}
else if ( distance1 < 10.48 && distance1 >= 10.36 ){
Serial.print("Sensor1 54% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "54_%");
delay (2000) ;
}
else if ( distance1 < 10.36 && distance1 >= 10.24 ){
Serial.print("Sensor1 53% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "53_%");
delay (2000) ;
}
else if ( distance1 < 10.24 && distance1 >= 10.12 ){
Serial.print("Sensor1 52% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "52_%");
delay (2000) ;
}
else if ( distance1 < 10.12 && distance1 >= 10.00 ){
Serial.print("Sensor1 51% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "51_%");
delay (2000) ;
}
else if ( distance1 < 10.00 && distance1 >= 9.88 ){
Serial.print("Sensor1 50% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "50_%");
delay (2000) ;
}
else if ( distance1 < 9.88 && distance1 >= 9.76 ){
Serial.print("Sensor1 49% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "49_%");
delay (2000) ;
}
else if ( distance1 < 9.76 && distance1 >= 9.64 ){
Serial.print("Sensor1 48% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "48_%");
delay (2000) ;
}
else if ( distance1 < 9.64 && distance1 >= 9.52 ){
Serial.print("Sensor1 47% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "47_%");
delay (2000) ;
}
else if ( distance1 < 9.52 && distance1 >= 9.40 ){
Serial.print("Sensor1 46% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "46_%");
delay (2000) ;
}
else if ( distance1 < 9.40 && distance1 >= 9.28 ){
Serial.print("Sensor1 45% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "45_%");
delay (2000) ;
}
else if ( distance1 < 9.28 && distance1 >= 9.16 ){
Serial.print("Sensor1 44% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "44_%");
delay (2000) ;
}
else if ( distance1 < 9.16 && distance1 >= 9.04 ){
Serial.print("Sensor1 43% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "43_%");
delay (2000) ;
}
else if ( distance1 < 9.04 && distance1 >= 8.92 ){
Serial.print("Sensor1 42% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "42_%");
delay (2000) ;
}
else if ( distance1 < 8.92 && distance1 >= 8.80 ){
Serial.print("Sensor1 41% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "41_%");
delay (2000) ;
}
else if ( distance1 < 8.80 && distance1 >= 8.68 ){
Serial.print("Sensor1 40% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "40_%");
delay (2000) ;
}
else if ( distance1 < 8.68 && distance1 >= 8.56 ){
Serial.print("Sensor1 39% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "39_%");
delay (2000) ;
}
else if ( distance1 < 8.56 && distance1 >= 8.44 ){
Serial.print("Sensor1 38% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "38_%");
delay (2000) ;
}
else if ( distance1 < 8.44 && distance1 >= 8.32 ){
Serial.print("Sensor1 37% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "37_%");
delay (2000) ;
}
else if ( distance1 < 8.32 && distance1 >= 8.20 ){
Serial.print("Sensor1 36% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "36_%");
delay (2000) ;
}
else if ( distance1 < 8.20 && distance1 >= 8.08 ){
Serial.print("Sensor1 35% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "35_%");
delay (2000) ;
}
else if ( distance1 < 8.08 && distance1 >= 7.96 ){
Serial.print("Sensor1 34% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "34_%");
delay (2000) ;
}
else if ( distance1 < 7.96 && distance1 >= 7.84 ){
Serial.print("Sensor1 33% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "33_%");
delay (2000) ;
}
else if ( distance1 < 7.84 && distance1 >= 7.72 ){
Serial.print("Sensor1 32% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "32_%");
delay (2000) ;
}
else if ( distance1 < 7.72 && distance1 >= 7.60 ){
Serial.print("Sensor1 31% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "31_%");
delay (2000) ;
}
else if ( distance1 < 7.60 && distance1 >= 7.48 ){
Serial.print("Sensor1 30% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "30_%");
delay (2000) ;
}
else if ( distance1 < 7.48 && distance1 >= 7.36 ){
Serial.print("Sensor1 29% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "29_%");
delay (2000) ;
}
else if ( distance1 < 7.36 && distance1 >= 7.24 ){
Serial.print("Sensor1 28% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "28_%");
delay (2000) ;
}
else if ( distance1 < 7.24 && distance1 >= 7.12 ){
Serial.print("Sensor1 27% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "27_%");
delay (2000) ;
}
else if ( distance1 < 7.12 && distance1 >= 7.00 ){
Serial.print("Sensor1 26% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "26_%");
delay (2000) ;
}
else if ( distance1 < 7.00 && distance1 >= 6.88 ){
Serial.print("Sensor1 25% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "25_%");
delay (2000) ;
}
else if ( distance1 < 6.88 && distance1 >= 6.76 ){
Serial.print("Sensor1 24% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "24_%");
delay (2000) ;
}
else if ( distance1 < 6.76 && distance1 >= 6.64 ){
Serial.print("Sensor1 23% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "23_%");
delay (2000) ;
}
else if ( distance1 < 6.64 && distance1 >= 6.52 ){
Serial.print("Sensor1 22% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "22_%");
delay (2000) ;
}
else if ( distance1 < 6.52 && distance1 >= 6.40 ){
Serial.print("Sensor1 21% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "21_%");
delay (2000) ;
}
else if ( distance1 < 6.40 && distance1 >= 6.28 ){
Serial.print("Sensor1 20% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "20_%");
LineNotify("Food 20 %25", true );
delay (2000) ;
}
else if ( distance1 < 6.28 && distance1 >= 6.16 ){
Serial.print("Sensor1 19% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "19_%");
delay (2000) ;
}
else if ( distance1 < 6.16 && distance1 >= 6.04 ){
Serial.print("Sensor1 18% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "18_%");
delay (2000) ;
}
else if ( distance1 < 6.04 && distance1 >= 5.92 ){
Serial.print("Sensor1 17% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "17_%");
delay (2000) ;
}
else if ( distance1 < 5.92 && distance1 >= 5.80 ){
Serial.print("Sensor1 16% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "16_%");
delay (2000) ;
}
else if ( distance1 < 5.80 && distance1 >= 5.68 ){
Serial.print("Sensor1 15% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "15_%");
delay (2000) ;
}
else if ( distance1 < 5.68 && distance1 >= 5.56 ){
Serial.print("Sensor1 14% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "14_%");
delay (2000) ;
}
else if ( distance1 < 5.56 && distance1 >= 5.44 ){
Serial.print("Sensor1 13% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "13_%");
delay (2000) ;
}
else if ( distance1 < 5.44 && distance1 >= 5.32 ){
Serial.print("Sensor1 12% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "12_%");
delay (2000) ;
}
else if ( distance1 < 5.32 && distance1 >= 5.20 ){
Serial.print("Sensor1 11% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "11_%");
delay (2000) ;
}
else if ( distance1 < 5.20 && distance1 >= 5.08 ){
Serial.print("Sensor1 10% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "10_%");
LineNotify("trueFood 10 %25", true );
delay (2000) ;
}
else if ( distance1 < 5.08 && distance1 >= 4.96 ){
Serial.print("Sensor1 9% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "9__%");
delay (2000) ;
}
else if ( distance1 < 4.96 && distance1 >= 4.84 ){
Serial.print("Sensor1 8% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "8__%");
delay (2000) ;
}
else if ( distance1 < 4.84 && distance1 >= 4.72 ){
Serial.print("Sensor1 7% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "7__%");
delay (2000) ;
}
else if ( distance1 < 4.72 && distance1 >= 4.60 ){
Serial.print("Sensor1 6% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "6__%");
delay (2000) ;
}
else if ( distance1 < 4.60 && distance1 >= 4.48 ){
Serial.print("Sensor1 5% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "5__%");
delay (2000) ;
}
else if ( distance1 < 4.48 && distance1 >= 4.36 ){
Serial.print("Sensor1 4% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "4__%");
delay (2000) ;
}
else if ( distance1 < 4.36 && distance1 >= 4.24 ){
Serial.print("Sensor1 3% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "3__%");
delay (2000) ;
}
else if ( distance1 < 4.24 && distance1 >= 4.12 ){
Serial.print("Sensor1 2% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "2__%");
delay (2000) ;
}
else if ( distance1 < 4.12 && distance1 >= 4.00 ){
Serial.print("Sensor1 1% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "1__%");
delay (2000) ;
}
else if ( distance1 < 4.00 && distance1 >= 0 ){
Serial.print("Sensor1 0% ");
Serial.print(distance1);
Serial.println("cm");
lcd.print(10, 0, "0__%");
LineNotify("trueFood 0 %25", true );
delay (2000) ;
}
type or paste code here
/////////////////////////////////ลูปการแสดงค่า LCD ใน Blynk Sensor 2
long duration2 ;
float distance2 ;
digitalWrite(trigPin2, LOW);
delayMicroseconds(2);
digitalWrite(trigPin2, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin2, LOW);
duration2 = pulseIn(echoPin2, HIGH);
distance2 = duration2 * 0.034 / 2;
if (distance2 >= maximumRange){
Serial.print(“100%”);
lcd.print(10, 1, " 100%");
}
else if ( distance2 < 16 && distance2 >= 15.88 ){
Serial.print("Sensor2 100% “);
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, " 100%”);
delay (2000) ;
}
else if ( distance2 < 15.76 && distance2 >= 15.64 ){
Serial.print("Sensor2 98% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “98_%”);
delay (2000) ;
}
else if ( distance2 < 15.64 && distance2 >= 15.52 ){
Serial.print("Sensor2 97% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “97_%”);
delay (2000) ;
}
else if ( distance2 < 15.52 && distance2 >= 15.40 ){
Serial.print("Sensor2 96% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “96_%”);
delay (2000) ;
}
else if ( distance2 < 15.40 && distance2 >= 15.28 ){
Serial.print("Sensor2 95% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “95_%”);
delay (2000) ;
}
else if ( distance2 < 15.28 && distance2 >= 15.16 ){
Serial.print("Sensor2 94% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “94_%”);
delay (2000) ;
}
else if ( distance2 < 15.16 && distance2 >= 15.04 ){
Serial.print("Sensor2 93% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “93_%”);
}
else if ( distance2 < 15.04 && distance2 >= 14.92 ){
Serial.print("Sensor2 92% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “92_%”);
delay (2000) ;
}
else if ( distance2 < 14.91 && distance2 >= 14.8 ){
Serial.print("Sensor2 91% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “91_%”);
}
else if ( distance2 < 14.8 && distance2 >= 14.68 ){
Serial.print("Sensor2 90% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “90_%”);
delay (2000) ;
}
else if ( distance2 < 14.68 && distance2 >= 14.56 ){
Serial.print("Sensor2 89% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “89_%”);
delay (2000) ;
}
else if ( distance2 < 14.56 && distance2 >= 14.44 ){
Serial.print("Sensor2 88% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “88_%”);
delay (2000) ;
}
else if ( distance2 < 14.44 && distance2 >= 14.32 ){
Serial.print("Sensor2 87% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “87_%”);
delay (2000) ;
}
else if ( distance2 < 14.32 && distance2 >= 14.20 ){
Serial.print("Sensor2 86% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “86_%”);
delay (2000) ;
}
else if ( distance2 < 14.20 && distance2 >= 14.08 ){
Serial.print("Sensor2 85% ");
Serial.print(distance1);
Serial.println(“cm”);
lcd.print(10, 1, “85_%”);
delay (2000) ;
}
else if ( distance2 < 14.08 && distance2 >= 13.96 ){
Serial.print("Sensor2 84% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “84_%”);
delay (2000) ;
}
else if ( distance2 < 13.96 && distance2 >= 13.84 ){
Serial.print("Sensor2 83% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “83_%”);
delay (2000) ;
}
else if ( distance2 < 13.84 && distance2 >= 13.72 ){
Serial.print("Sensor2 82% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “82_%”);
delay (2000) ;
}
else if ( distance2 < 13.72 && distance2 >= 13.60 ){
Serial.print("Sensor2 81% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “81_%”);
delay (2000) ;
}
else if ( distance2 < 13.60 && distance2 >= 13.48 ){
Serial.print("Sensor2 80% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “80_%”);
delay (2000) ;
}
else if ( distance2 < 13.48 && distance2 >= 13.36 ){
Serial.print("Sensor2 79% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “79_%”);
delay (2000) ;
}
else if ( distance2 < 13.36 && distance2 >= 13.24 ){
Serial.print("Sensor2 78% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “78_%”);
delay (2000) ;
}
else if ( distance2 < 13.24 && distance2 >= 13.12 ){
Serial.print("Sensor2 77% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “77_%”);
delay (2000) ;
}
else if ( distance2 < 13.12 && distance2 >= 13.00 ){
Serial.print("Sensor2 76% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “76_%”);
delay (2000) ;
}
else if ( distance2 < 13.00 && distance2 >= 12.88 ){
Serial.print("Sensor2 75% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “75_%”);
delay (2000) ;
}
else if ( distance2 < 12.88 && distance2 >= 12.76 ){
Serial.print("Sensor2 74% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “74_%”);
delay (2000) ;
}
else if ( distance2 < 12.76 && distance2 >= 12.64 ){
Serial.print("Sensor2 73% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “73_%”);
delay (2000) ;
}
else if ( distance2 < 12.64 && distance2 >= 12.52 ){
Serial.print("Sensor2 72% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “72_%”);
delay (2000) ;
}
else if ( distance2 < 12.52 && distance2 >= 12.40 ){
Serial.print("Sensor2 71% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “71_%”);
delay (2000) ;
}
else if ( distance2 < 12.40 && distance2 >= 12.28 ){
Serial.print("Sensor2 70% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “70_%”);
delay (2000) ;
}
else if ( distance2 < 12.28 && distance2 >= 12.16 ){
Serial.print("Sensor2 69% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “69_%”);
delay (2000) ;
}
else if ( distance2 < 12.16 && distance2 >= 12.04 ){
Serial.print("Sensor2 68% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “68_%”);
delay (2000) ;
}
else if ( distance2 < 12.04 && distance2 >= 11.92 ){
Serial.print("Sensor2 67% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “67_%”);
delay (2000) ;
}
else if ( distance2 < 11.92 && distance2 >= 11.80 ){
Serial.print("Sensor2 66% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “66_%”);
delay (2000) ;
}
else if ( distance2 < 11.80 && distance2 >= 11.68 ){
Serial.print("Sensor2 65% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “65_%”);
delay (2000) ;
}
else if ( distance2 < 11.68 && distance2 >= 11.56 ){
Serial.print("Sensor2 64% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “64_%”);
delay (2000) ;
}
else if ( distance2 < 11.56 && distance2 >= 11.44 ){
Serial.print("Sensor2 63% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “63_%”);
delay (2000) ;
}
else if ( distance2 < 11.44 && distance2 >= 11.32 ){
Serial.print("Sensor2 62% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “62_%”);
delay (2000) ;
}
else if ( distance2 < 11.32 && distance2 >= 11.20 ){
Serial.print("Sensor2 61% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “61_%”);
delay (2000) ;
}
else if ( distance2 < 11.20 && distance2 >= 11.08 ){
Serial.print("Sensor2 60% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “60_%”);
delay (2000) ;
}
else if ( distance2 < 11.08 && distance2 >= 10.96 ){
Serial.print("Sensor2 59% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “59_%”);
delay (2000) ;
}
else if ( distance2 < 10.96 && distance2 >= 10.84 ){
Serial.print("Sensor2 58% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “58_%”);
delay (2000) ;
}
else if ( distance2 < 10.84 && distance2 >= 10.72 ){
Serial.print("Sensor2 57% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “57_%”);
delay (2000) ;
}
else if ( distance2 < 10.72 && distance2 >= 10.60 ){
Serial.print("Sensor2 56% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “56_%”);
delay (2000) ;
}
else if ( distance2 < 10.60 && distance2 >= 10.48 ){
Serial.print("Sensor2 55% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “55_%”);
delay (2000) ;
}
else if ( distance2 < 10.48 && distance2 >= 10.36 ){
Serial.print("Sensor2 54% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “54_%”);
delay (2000) ;
}
else if ( distance2 < 10.36 && distance2 >= 10.24 ){
Serial.print("Sensor2 53% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “53_%”);
delay (2000) ;
}
else if ( distance2 < 10.24 && distance2 >= 10.12 ){
Serial.print("Sensor2 52% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “52_%”);
delay (2000) ;
}
else if ( distance2 < 10.12 && distance2 >= 10.00 ){
Serial.print("Sensor2 51% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “51_%”);
delay (2000) ;
}
else if ( distance2 < 10.00 && distance2 >= 9.88 ){
Serial.print("Sensor2 50% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “50_%”);
delay (2000) ;
}
else if ( distance2 < 9.88 && distance2 >= 9.76 ){
Serial.print("Sensor2 49% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “49_%”);
delay (2000) ;
}
else if ( distance2 < 9.76 && distance2 >= 9.64 ){
Serial.print("Sensor2 48% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “48_%”);
delay (2000) ;
}
else if ( distance2 < 9.64 && distance2 >= 9.52 ){
Serial.print("Sensor2 47% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “47_%”);
delay (2000) ;
}
else if ( distance2 < 9.52 && distance2 >= 9.40 ){
Serial.print("Sensor2 46% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “46_%”);
delay (2000) ;
}
else if ( distance2 < 9.40 && distance2 >= 9.28 ){
Serial.print("Sensor2 45% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “45_%”);
delay (2000) ;
}
else if ( distance2 < 9.28 && distance2 >= 9.16 ){
Serial.print("Sensor2 44% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “44_%”);
delay (2000) ;
}
else if ( distance2 < 9.16 && distance2 >= 9.04 ){
Serial.print("Sensor2 43% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “43_%”);
delay (2000) ;
}
else if ( distance2 < 9.04 && distance2 >= 8.92 ){
Serial.print("Sensor2 42% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “42_%”);
delay (2000) ;
}
else if ( distance2 < 8.92 && distance2 >= 8.80 ){
Serial.print("Sensor2 41% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “41_%”);
delay (2000) ;
}
else if ( distance2 < 8.80 && distance2 >= 8.68 ){
Serial.print("Sensor2 40% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “40_%”);
delay (2000) ;
}
else if ( distance2 < 8.68 && distance2 >= 8.56 ){
Serial.print("Sensor2 39% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “39_%”);
delay (2000) ;
}
else if ( distance2 < 8.56 && distance2 >= 8.44 ){
Serial.print("Sensor2 38% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “38_%”);
delay (2000) ;
}
else if ( distance2 < 8.44 && distance2 >= 8.32 ){
Serial.print("Sensor2 37% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “37_%”);
delay (2000) ;
}
else if ( distance2 < 8.32 && distance2 >= 8.20 ){
Serial.print("Sensor2 36% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “36_%”);
delay (2000) ;
}
else if ( distance2 < 8.20 && distance2 >= 8.08 ){
Serial.print("Sensor2 35% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “35_%”);
delay (2000) ;
}
else if ( distance2 < 8.08 && distance2 >= 7.96 ){
Serial.print("Sensor2 34% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “34_%”);
delay (2000) ;
}
else if ( distance2 < 7.96 && distance2 >= 7.84 ){
Serial.print("Sensor2 33% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “33_%”);
delay (2000) ;
}
else if ( distance2 < 7.84 && distance2 >= 7.72 ){
Serial.print("Sensor2 32% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “32_%”);
delay (2000) ;
}
else if ( distance2 < 7.72 && distance2 >= 7.60 ){
Serial.print("Sensor2 31% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “31_%”);
delay (2000) ;
}
else if ( distance2 < 7.60 && distance2 >= 7.48 ){
Serial.print("Sensor2 30% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “30_%”);
delay (2000) ;
}
else if ( distance2 < 7.48 && distance2 >= 7.36 ){
Serial.print("Sensor2 29% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “29_%”);
delay (2000) ;
}
else if ( distance2 < 7.36 && distance2 >= 7.24 ){
Serial.print("Sensor2 28% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “28_%”);
delay (2000) ;
}
else if ( distance2 < 7.24 && distance2 >= 7.12 ){
Serial.print("Sensor2 27% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “27_%”);
delay (2000) ;
}
else if ( distance2 < 7.12 && distance2 >= 7.00 ){
Serial.print("Sensor2 26% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “26_%”);
delay (2000) ;
}
else if ( distance2 < 7.00 && distance2 >= 6.88 ){
Serial.print("Sensor2 25% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “25_%”);
delay (2000) ;
}
else if ( distance2 < 6.88 && distance2 >= 6.76 ){
Serial.print("Sensor2 24% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “24_%”);
delay (2000) ;
}
else if ( distance2 < 6.76 && distance2 >= 6.64 ){
Serial.print("Sensor2 23% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “23_%”);
delay (2000) ;
}
else if ( distance2 < 6.64 && distance2 >= 6.52 ){
Serial.print("Sensor2 22% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “22_%”);
delay (2000) ;
}
else if ( distance2 < 6.52 && distance2 >= 6.40 ){
Serial.print("Sensor2 21% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “21_%”);
delay (2000) ;
}
else if ( distance2 < 6.40 && distance2 >= 6.28 ){
Serial.print("Sensor2 20% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “20_%”);
LineNotify(“Food 20 %25”, true );
delay (2000) ;
}
else if ( distance2 < 6.28 && distance2 >= 6.16 ){
Serial.print("Sensor2 19% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “19_%”);
delay (2000) ;
}
else if ( distance2 < 6.16 && distance2 >= 6.04 ){
Serial.print("Sensor2 18% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “18_%”);
delay (2000) ;
}
else if ( distance2 < 6.04 && distance2 >= 5.92 ){
Serial.print("Sensor2 17% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “17_%”);
delay (2000) ;
}
else if ( distance2 < 5.92 && distance2 >= 5.80 ){
Serial.print("Sensor2 16% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “16_%”);
delay (2000) ;
}
else if ( distance2 < 5.80 && distance2 >= 5.68 ){
Serial.print("Sensor2 15% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “15_%”);
delay (2000) ;
}
else if ( distance2 < 5.68 && distance2 >= 5.56 ){
Serial.print("Sensor2 14% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “14_%”);
delay (2000) ;
}
else if ( distance2 < 5.56 && distance2 >= 5.44 ){
Serial.print("Sensor2 13% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “13_%”);
delay (2000) ;
}
else if ( distance2 < 5.44 && distance2 >= 5.32 ){
Serial.print("Sensor2 12% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “12_%”);
delay (2000) ;
}
else if ( distance2 < 5.32 && distance2 >= 5.20 ){
Serial.print("Sensor2 11% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “11_%”);
delay (2000) ;
}
else if ( distance2 < 5.20 && distance2 >= 5.08 ){
Serial.print("Sensor2 10% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “10_%”);
LineNotify(“trueFood 10 %25”, true );
delay (2000) ;
}
else if ( distance2 < 5.08 && distance2 >= 4.96 ){
Serial.print("Sensor2 9% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “9__%”);
delay (2000) ;
}
else if ( distance2 < 4.96 && distance2 >= 4.84 ){
Serial.print("Sensor2 8% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “8__%”);
delay (2000) ;
}
else if ( distance2 < 4.84 && distance2 >= 4.72 ){
Serial.print("Sensor2 7% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “7__%”);
delay (2000) ;
}
else if ( distance2 < 4.72 && distance2 >= 4.60 ){
Serial.print("Sensor2 6% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “6__%”);
delay (2000) ;
}
else if ( distance2 < 4.60 && distance2 >= 4.48 ){
Serial.print("Sensor2 5% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “5__%”);
delay (2000) ;
}
else if ( distance2 < 4.48 && distance2 >= 4.36 ){
Serial.print("Sensor2 4% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “4__%”);
delay (2000) ;
}
else if ( distance2 < 4.36 && distance2 >= 4.24 ){
Serial.print("Sensor2 3% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “3__%”);
delay (2000) ;
}
else if ( distance2 < 4.24 && distance2 >= 4.12 ){
Serial.print("Sensor2 2% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “2__%”);
delay (2000) ;
}
else if ( distance2 < 4.12 && distance2 >= 4.00 ){
Serial.print("Sensor2 1% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “1__%”);
delay (2000) ;
}
else if ( distance2 < 4.00 && distance2 >= 0 ){
Serial.print("Sensor2 0% ");
Serial.print(distance2);
Serial.println(“cm”);
lcd.print(10, 1, “0__%”);
LineNotify(“Food 0 %25”, true );
delay (2000) ;
}
lcd.print(0, 0, “Food Level”); // use: (position X: 0-15, position Y: 0-1, “Message you want to print”)
lcd.print(0, 1, “Food Level”);
Blynk.run();
}
/////////////////////////////////////////////////////จบการทำงานของ Blynk
void connectNetwork(char options)
{
switch (options)
{
case ‘n’:
connectWiFi();
break;
case ‘b’:
connectBlynk();
break;
}
}
void connectWiFi()
{
WiFi.mode(WIFI_OFF); // Prevents reconnection issue (taking too long to connect)
delay(1000);
WiFi.mode(WIFI_STA); // Only Station No AP, This line hides the viewing of ESP as wifi hotspot
WiFi.begin(ssid, password); // WiFi connection
while (WiFi.status() != WL_CONNECTED)
{
// Wait for the WiFI connection completion
delay(500);
Serial.println(“Waiting for connection”);
}
Serial.println();
Serial.println(“WiFi connected”);
}
void connectBlynk()
{
Blynk.begin(auth, ssid, password);
}
void LineNotify(String msg, bool debug)
{
if (WiFi.status() == WL_CONNECTED)
{
WiFiClientSecure httpsClient;
Serial.print("Connecting to … ");
Serial.println(lineHost);
// certificate pinning
Serial.printf("Using fingerprint ... '%s'\n", fingerprint);
httpsClient.setFingerprint(fingerprint);
httpsClient.setTimeout(httpTimeout);
delay(1000);
if (!httpsClient.connect(lineHost, httpsPort))
{
Serial.println("Connection failed");
return;
}
Serial.print("[HTTPS] begin...");
String LineNotifyMessage = "message=" + msg;
int lineMessageContentLen = String(LineNotifyMessage).length();
String req = "";
req += "POST /api/notify HTTP/1.1\r\n";
req += "Host: " + lineHost + "\r\n";
req += "Authorization: Bearer " + token + "\r\n";
req += "User-Agent: line-iot\r\n";
req += "Connection: close\r\n";
req += "Content-Type: application/x-www-form-urlencoded\r\n";
req += "Content-Length: " + String(lineMessageContentLen) + "\r\n";
req += "\r\n";
req += LineNotifyMessage;
if (debug)
{
Serial.print("\nRequest payload: ");
Serial.println(req);
}
// Send http request
httpsClient.print(req);
delay(500);
while (httpsClient.connected())
{
String line = httpsClient.readStringUntil('\n');
if (line == "\r")
{
Serial.println("Push LINE Notify successfull!");
break;
}
}
String line = httpsClient.readStringUntil('\n');
Serial.println("reply was:");
Serial.println("==========");
Serial.println(line);
Serial.println("==========");
Serial.println("closing connection");
}
}
bool SchedulerInMinutes(int period, unsigned long timeNow)
{
unsigned long p = period * DELAY_1_MINUTE;
return millis() > timeNow + p;
}
bool SchedulerInSecs(int period, unsigned long timeNow)
{
unsigned long p = period * DELAY_1_S;
return millis() > timeNow + p;
}
โค้ตรวมมีกี่บรรทัดครับ ยาวมากกกกก
1657 บรรทัด ครับ ช่วงเขียนเปอร์เซ็น ผมไม่รู้ว่าใช้อะไรได้นอกจาก if else เลยเยอะมากครับ
อะไรที่ซ้ำๆ ควรใช้ for loop นะครับ
อันนี้ตัวอย่างกระทู้ที่ใช้ for loop ลดโค้ตครับ
คำถามคือทำไมถึงทำงานช้า ถ้าดูจากโค้ตนี้แถบไม่ต้องสืบเลยครับ 555
555 ปัญหาคือ บรรทัดโค้ดมันเยอะเกินไปใช่ไหมครับ เลยทำงานดีเลย์
มันเป็นค่าจาก ultrasonic แล้วแสดงค่าเป็นเปอร์เซ็น ผมไม่รู้จะย่อเป็น For ยังไงอะครับ
- เวลาต่อใช้งานแบบไหนครับ
- อธิบายการทำงานของระบบหน่อยว่าทำงานอะไรบ้าง ทำไมถึงใช้โค้ตยาวแบบนี้
