ตอนนี้ผมกำลังทำการทดลองเรื่อง DC Motor อยู่ครับ โดยจะมีตัวต้านทานปรับค่าได้ 10k โอห์ม ใช้เวลาปรับ reverse forward ตัวมอเตอร์ แต่ผมจะทำการจำลองต่อวงจรใน proteus แล้วติดปัญหาครับ ปัญหาคือ ผมลากตัว R ปรับค่าได้แล้วมอเตอร์ไม่ยอมหยุดหมุนครับ ไม่ยอม reverse forward ตามจังหวะการหมุนของ voume ช่วยแนะนำทีครับ ขอบคุณครับ
1 Likes
ต่อถูกต้องไหมครับมีรูปไหม
1 Likes
ลองสมัครเข้าไปต่อในนี้ดูครับว่าเป็นเหมือนกันไหม
1 Likes

ขอดูโค้ตที่ใช้กับ Arduino nano หน่อยครับ
1 Likes
int SENSOR_PIN = 0; // center pin of the potentiometer
int RPWM_Output = 5; // Arduino PWM output pin 5; connect to IBT-2 pin 1 (RPWM)
int LPWM_Output = 6; // Arduino PWM output pin 6; connect to IBT-2 pin 2 (LPWM)
void setup()
{
pinMode(RPWM_Output, OUTPUT);
pinMode(LPWM_Output, OUTPUT);
}
void loop()
{
int sensorValue = analogRead(SENSOR_PIN);
// sensor value is in the range 0 to 1023
// the lower half of it we use for reverse rotation; the upper half for forward rotation
if (sensorValue < 512)
{
// reverse rotation
int reversePWM = -(sensorValue - 511) / 2;
analogWrite(LPWM_Output, 0);
analogWrite(RPWM_Output, reversePWM);
}
else
{
// forward rotation
int forwardPWM = (sensorValue - 512) / 2;
analogWrite(LPWM_Output, forwardPWM);
analogWrite(RPWM_Output, 0);
}
}เอาตัวอย่างโค้ตมาจากไหนหรอ เขาให้ต่อแบบนี้เลยใช่ไหมครับเพราะว่า DC motor ถ้าต่อโดยไม่ผ่าน arduino มันก็อาจจะทำงานตามที่น้องว่า แต่โค้ตนี้คือมันใช้สำหรับต่อกับ สเต็ปปิ้งมอเตอร์ ครับ โดยสเต็ปปิ้งมอเตอร์ จะทำงานแปรผันตรงกับความถี่ที่ได้รับ ความถี่มาก ความเร็วมาก ความถี่น้อยความเร็วก็น้อยตาม สัญญาณที่ออกมาจาก PIN D6 D5 จะได้ออกมาเป็นสัญาณ PWM ซึ่งไม่ว่าจะความถี่แค่ไหน DC motor ก็ไม่เร็วไม่ช้าเพราะแค่จ่ายไฟคงที่จาก PIN ให้มันเท่านั้นครับ ต้องเปลี่ยนชุดมอเตอร์ครับ
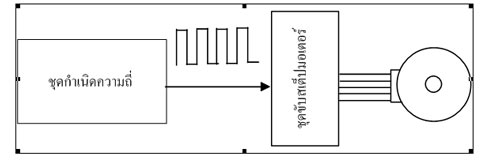
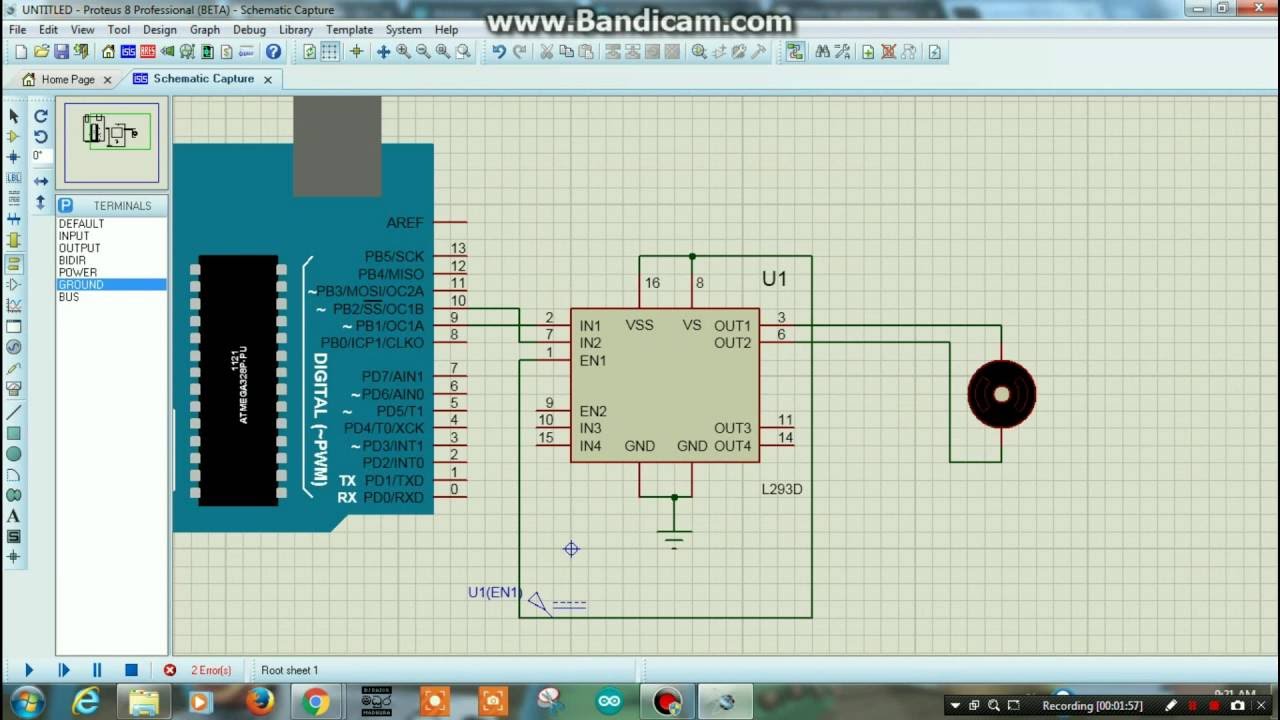
น่าจะต้องต่อความนี้ครับดูเฉพาะชุดขับมอเตอร์นะครับ
1 Likes
ขอบคุณมากครับพี่ 

แก้ไขภาพนิดหน่อยครับจะได้มองง่ายๆ
1 Likes
ได้ไม่ได้ยังไงมาอัตเดทกันด้วยนะครับผม
1 Likes
ได้ครับผมมม
1 Likes

